project restructure + version bump 0.2.0
This commit is contained in:
parent
8d24b8b7a1
commit
db5f007d22
136
CMakeLists.txt
136
CMakeLists.txt
|
|
@ -1,127 +1,34 @@
|
|||
cmake_minimum_required(VERSION 3.20)
|
||||
|
||||
set(CMAKE_INCLUDE_CURRENT_DIR ON)
|
||||
|
||||
# set the project name and version
|
||||
project(ESTA VERSION 0.1.1 LANGUAGES CXX)
|
||||
project(OpenLCP VERSION 0.2.0 LANGUAGES CXX)
|
||||
set(DEFAULT_BUILD_TYPE "Release")
|
||||
configure_file(config.h.in config.h)
|
||||
|
||||
add_compile_definitions(BUILT_WITH_CMAKE)
|
||||
cmake_minimum_required(VERSION 3.20)
|
||||
|
||||
set(CMAKE_CXX_STANDARD 17)
|
||||
set(CMAKE_CXX_STANDARD_REQUIRED ON)
|
||||
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -fno-rtti")
|
||||
set(CMAKE_INCLUDE_CURRENT_DIR ON)
|
||||
set(CMAKE_AUTOUIC OFF)
|
||||
set(CMAKE_AUTOMOC OFF)
|
||||
set(CMAKE_AUTORCC OFF)
|
||||
if (CMAKE_BUILD_TYPE STREQUAL "Debug")
|
||||
set(CMAKE_CXX_FLAGS_DEBUG "${CMAKE_CXX_FLAGS_DEBUG} -D_GLIBCXX_DEBUG")
|
||||
endif()
|
||||
|
||||
set(CMAKE_AUTOUIC OFF)
|
||||
set(CMAKE_AUTOMOC OFF)
|
||||
set(CMAKE_AUTORCC OFF)
|
||||
add_compile_definitions(BUILT_WITH_CMAKE)
|
||||
configure_file(config.h.in config.h)
|
||||
|
||||
set(SOURCE_FILES
|
||||
acn/appliance.cpp
|
||||
acn/appliance.h
|
||||
acn/component.h
|
||||
acn/dmp.cpp
|
||||
acn/dmp.h
|
||||
acn/pdu-stream.cpp
|
||||
acn/pdu-stream.h
|
||||
acn/pdu.cpp
|
||||
acn/pdu.h
|
||||
acn/rlp-tcp.cpp
|
||||
acn/rlp-tcp.h
|
||||
acn/rlp-udp.cpp
|
||||
acn/rlp-udp.h
|
||||
acn/rlp.cpp
|
||||
acn/rlp.h
|
||||
acn/sdt-channel.h
|
||||
acn/sdt-channel.cpp
|
||||
acn/sdt-session.h
|
||||
acn/sdt-session.cpp
|
||||
acn/sdt-udp.cpp
|
||||
acn/sdt-udp.h
|
||||
acn/sdt.cpp
|
||||
acn/sdt.h
|
||||
dmx/device.h
|
||||
dmx/device.cpp
|
||||
dmx/dmx.h
|
||||
dmx/personality.h
|
||||
dmx/personality.cpp
|
||||
dmx/universe.cpp
|
||||
dmx/universe.h
|
||||
otp/advertisement.h
|
||||
otp/advertisement.cpp
|
||||
otp/base.h
|
||||
otp/base.cpp
|
||||
otp/otp.h
|
||||
otp/pdu.h
|
||||
otp/pdu.cpp
|
||||
otp/transform.h
|
||||
otp/transform.cpp
|
||||
rdm/controller.h
|
||||
rdm/controller.cpp
|
||||
rdm/device.h
|
||||
rdm/device.cpp
|
||||
rdm/E1.37-1.h
|
||||
rdm/E1.37-2.h
|
||||
rdm/E1.37-7.h
|
||||
rdm/message.h
|
||||
rdm/message.cpp
|
||||
rdm/parameter.h
|
||||
rdm/parameter.cpp
|
||||
rdm/rdm.h
|
||||
rdm/rdm.cpp
|
||||
rdm/responder.h
|
||||
rdm/responder.cpp
|
||||
rdm/sensor.h
|
||||
rdm/sensor.cpp
|
||||
rdm/status.h
|
||||
rdm/uid.h
|
||||
rdmnet/broker-protocol.h
|
||||
rdmnet/broker-protocol.cpp
|
||||
rdmnet/broker.h
|
||||
rdmnet/broker.cpp
|
||||
rdmnet/client.h
|
||||
rdmnet/client.cpp
|
||||
rdmnet/component.h
|
||||
rdmnet/controller.h
|
||||
rdmnet/controller.cpp
|
||||
rdmnet/device.h
|
||||
rdmnet/device.cpp
|
||||
rdmnet/ept.cpp
|
||||
rdmnet/ept.h
|
||||
rdmnet/llrp.cpp
|
||||
rdmnet/llrp.h
|
||||
rdmnet/manager.h
|
||||
rdmnet/manager.cpp
|
||||
rdmnet/pdu.h
|
||||
rdmnet/pdu.cpp
|
||||
rdmnet/rdmnet.h
|
||||
rdmnet/rpt.cpp
|
||||
rdmnet/rpt.h
|
||||
rdmnet/target.h
|
||||
rdmnet/target.cpp
|
||||
sacn/data.cpp
|
||||
sacn/data.h
|
||||
sacn/extended.cpp
|
||||
sacn/extended.h
|
||||
sacn/node.cpp
|
||||
sacn/node.h
|
||||
sacn/receiver.cpp
|
||||
sacn/receiver.h
|
||||
sacn/sacn.h
|
||||
sacn/source.cpp
|
||||
sacn/source.h
|
||||
sacn/universe.cpp
|
||||
sacn/universe.h
|
||||
uuid/uuid.cpp
|
||||
uuid/uuid.h
|
||||
)
|
||||
|
||||
#add_library(${PROJECT_NAME} STATIC ${SOURCE_FILES})
|
||||
add_library(${PROJECT_NAME} SHARED ${SOURCE_FILES})
|
||||
add_library(${PROJECT_NAME} SHARED)
|
||||
# E1.11
|
||||
include(dmx/CMakeLists.txt)
|
||||
# E1.17
|
||||
include(acn/CMakeLists.txt)
|
||||
# E1.20
|
||||
include(rdm/CMakeLists.txt)
|
||||
# E1.31
|
||||
include(sacn/CMakeLists.txt)
|
||||
# E1.33
|
||||
include(rdmnet/CMakeLists.txt)
|
||||
# E1.56
|
||||
include(otp/CMakeLists.txt)
|
||||
|
||||
set_target_properties(${PROJECT_NAME} PROPERTIES VERSION ${PROJECT_VERSION})
|
||||
set_target_properties(${PROJECT_NAME} PROPERTIES SOVERSION ${PROJECT_VERSION})
|
||||
|
|
@ -129,4 +36,5 @@ set_target_properties(${PROJECT_NAME} PROPERTIES SOVERSION ${PROJECT_VERSION})
|
|||
target_compile_definitions(${PROJECT_NAME} PUBLIC ${PROJECT_NAME}_LIBRARY)
|
||||
target_include_directories(${PROJECT_NAME} PUBLIC ${CMAKE_CURRENT_SOURCE_DIR})
|
||||
|
||||
# GTests
|
||||
add_subdirectory(test)
|
||||
|
|
|
|||
29
README.md
29
README.md
|
|
@ -1,12 +1,33 @@
|
|||
# LibESTA
|
||||
# OpenLCP
|
||||
|
||||
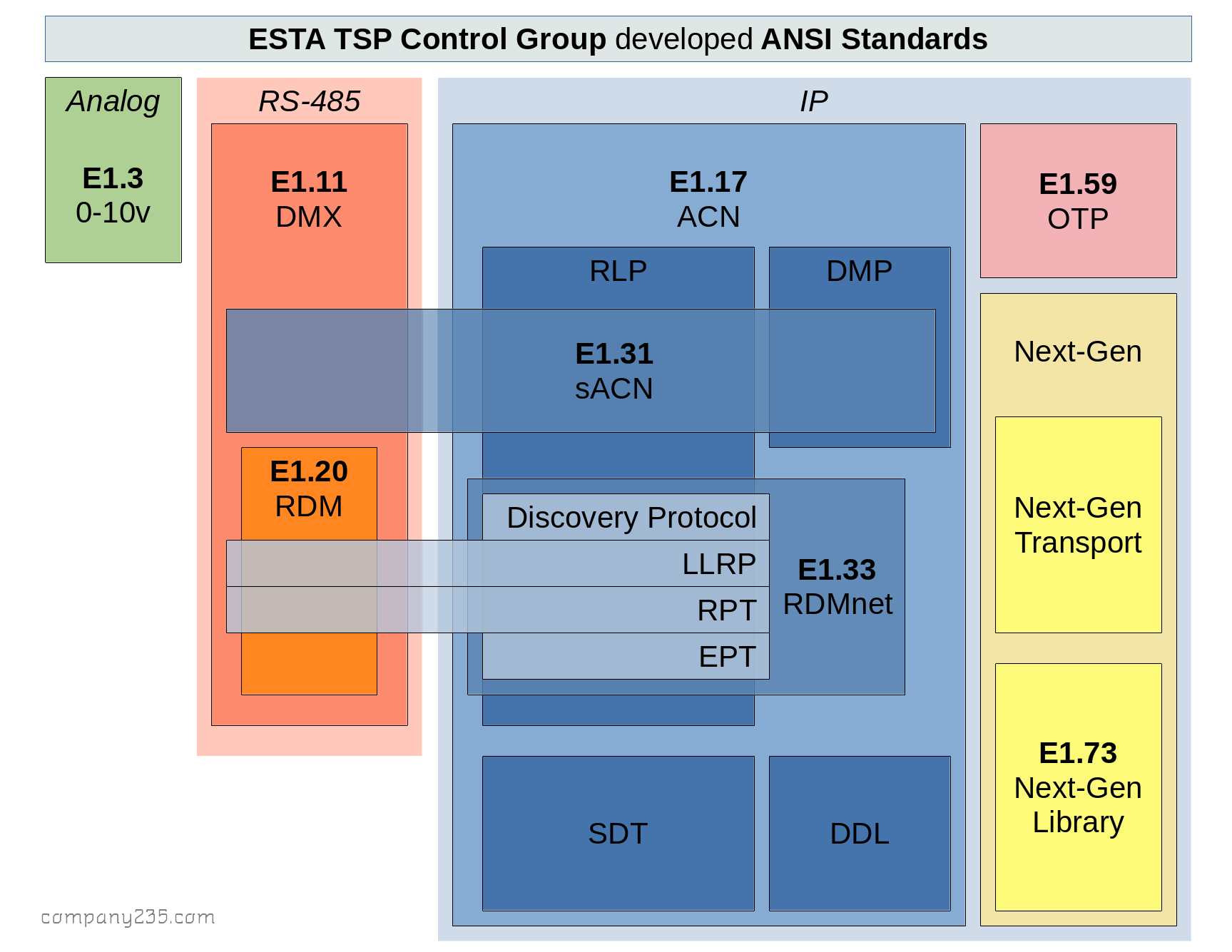
A collection of C++ libraries for ESTA sponsored ANSI standards.
|
||||
A collection of C++ libraries for Lighting Control Protocols, focusing on ESTA
|
||||
sponsored ANSI standards.
|
||||
|
||||
|
||||
|
||||
## ACN PDU
|
||||
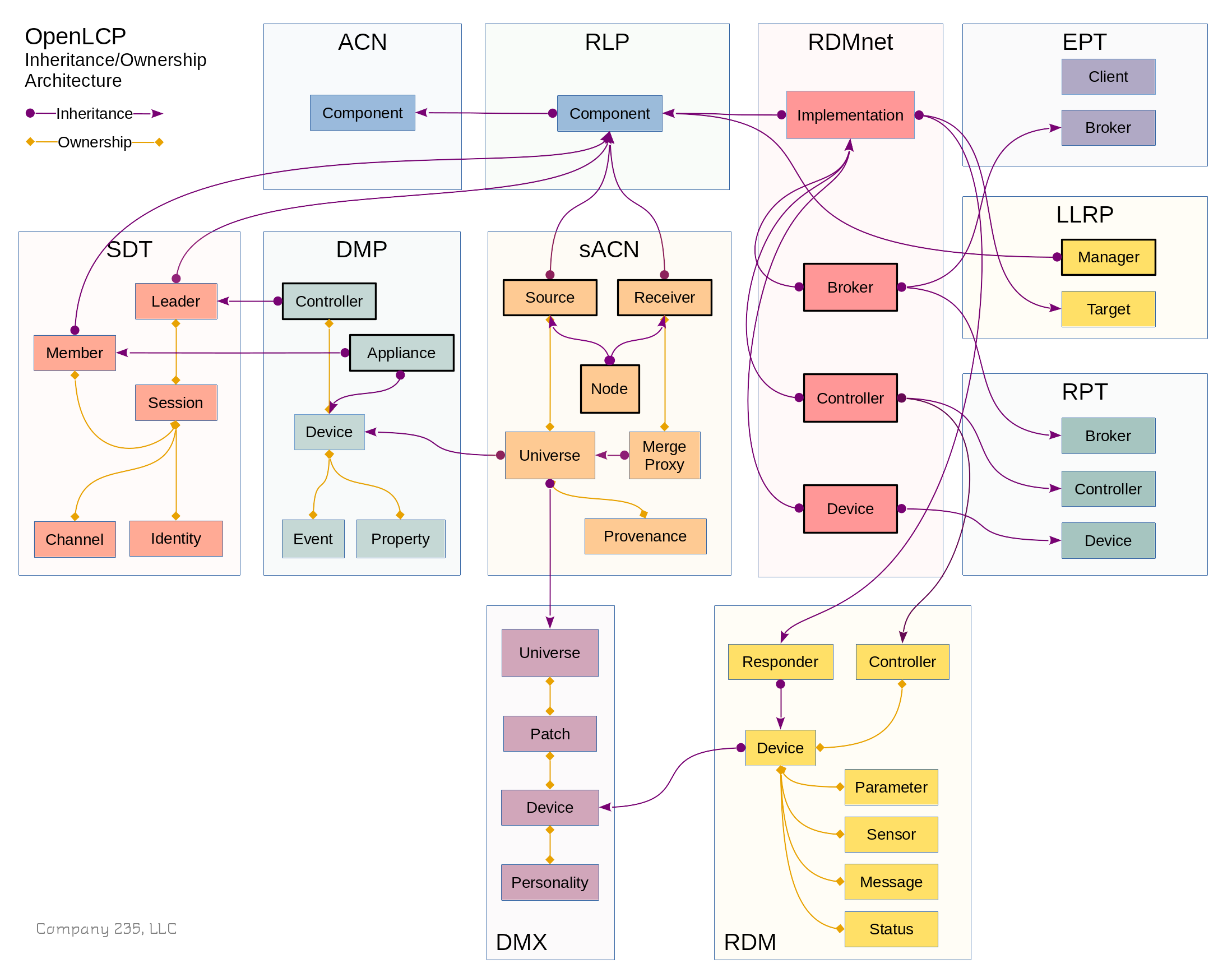
## Object Architecture
|
||||
|
||||
E1.17 is designed around a hierarchical data structure of nested Protocol Data Units. These `PDU` may encapsulate one or more `PDU` of an embedded protocol, or be a data endpoint for that protocol. The following slide describes the relational hierocracy of the `PDU` within `ACN`, `sACN`, `RDMnet`, and `OTP`. While similiar in structure and concept, the `PDU` in `RDMnet` do not inherit directly from the `PDU` in `ACN`. Any omission in the tree is likely due to a combination of poor documentation within the standard and/or incomplete implementation within the library (IE. `SDT`.)
|
||||
The library encompases both the structured data being communicated between
|
||||
controllable components, and the control objects that expose the data in
|
||||
meaningful ways, without needing to know or understand the underlying protocols.
|
||||
|
||||
### Objects
|
||||
|
||||
Control objects are structured thusly;
|
||||
|
||||
|
||||
|
||||
|
||||
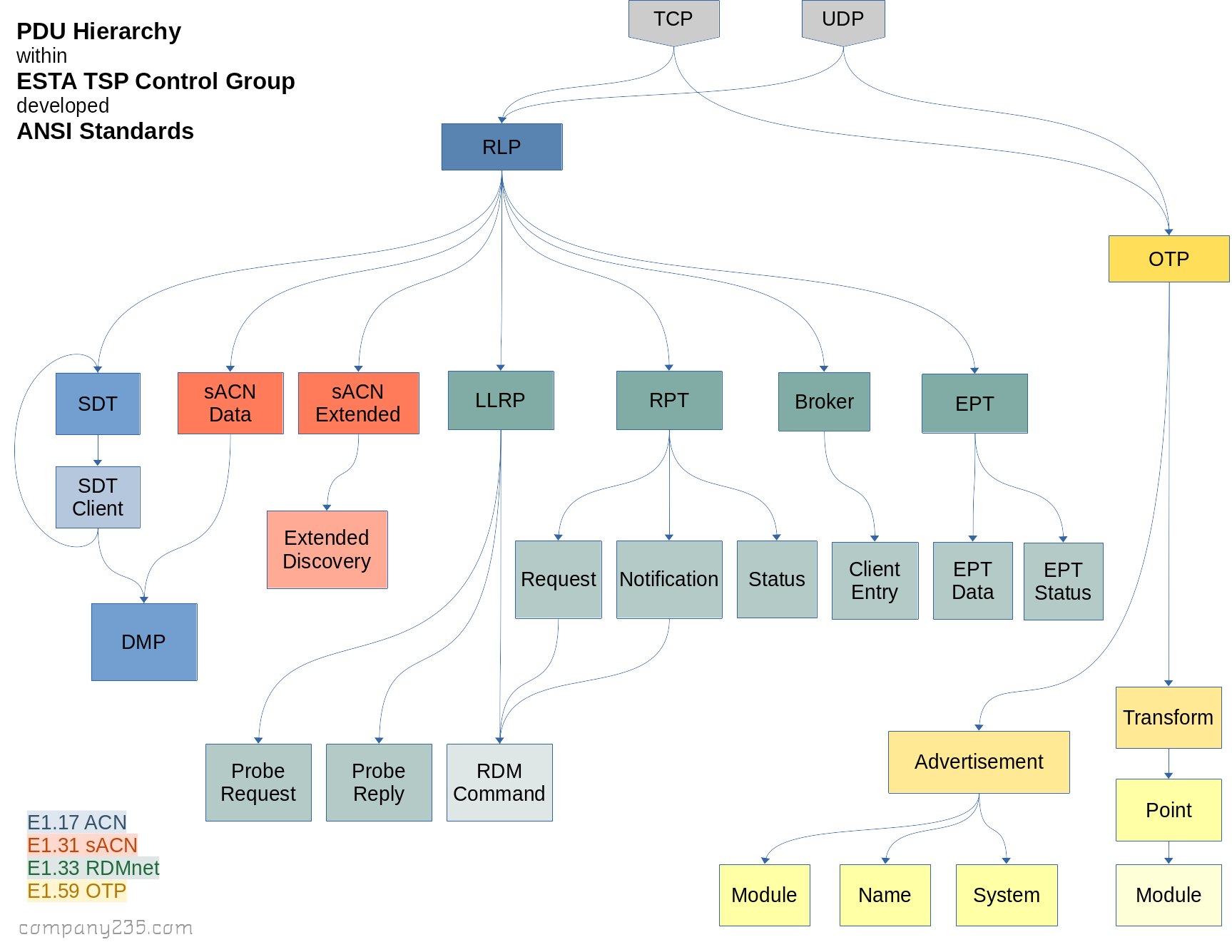
### Data
|
||||
|
||||
Serveral of the ESTA protocols use the E1.17 Protocol Data Unit to transfer
|
||||
data. The `PDU` are a series of nested hierarchical data structures. `PDU` may
|
||||
encapsulate one or more `PDU` of an embedded protocol, or be a data endpoint
|
||||
for that protocol. The following slide describes the relational hierocracy of
|
||||
the `PDU` within `ACN`, `sACN`, `RDMnet`, and `OTP`. While similiar in
|
||||
structure and concept, the `PDU` in `RDMnet` do not inherit directly from the
|
||||
`PDU` in `ACN`, and the `PDU` in `OTP` are notably simpler, as data segments
|
||||
may not be inherited from sibling `PDU` in the data.
|
||||
|
||||
|
||||
|
||||
|
|
|
|||
|
|
@ -0,0 +1,13 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PRIVATE
|
||||
acn/component.h
|
||||
acn/pdu-stream.cpp
|
||||
acn/pdu-stream.h
|
||||
acn/pdu.cpp
|
||||
acn/pdu.h
|
||||
)
|
||||
|
||||
include(dmp/CMakeLists.txt)
|
||||
include(rlp/CMakeLists.txt)
|
||||
include(sdt/CMakeLists.txt)
|
||||
include(uuid/CMakeLists.txt)
|
||||
|
|
@ -39,7 +39,7 @@ namespace ACN {
|
|||
class Component {
|
||||
public:
|
||||
Component(UUID::uuid cid = UUID::uuid())
|
||||
: fctn_(std::string("libESTA ACN Component"))
|
||||
: fctn_(std::string("OpenLCP ACN Component"))
|
||||
, uacn_(std::string())
|
||||
, cid_(cid)
|
||||
{};
|
||||
|
|
|
|||
|
|
@ -28,8 +28,7 @@
|
|||
#include <memory>
|
||||
#include <iostream>
|
||||
|
||||
namespace ACN {
|
||||
namespace PDU {
|
||||
namespace ACN::PDU {
|
||||
|
||||
struct pdu_stream_object;
|
||||
|
||||
|
|
@ -123,6 +122,5 @@ struct pdu_stream_object
|
|||
};
|
||||
|
||||
|
||||
} // PDU
|
||||
} // ACN
|
||||
} // ACN::PDU
|
||||
|
||||
|
|
|
|||
|
|
@ -28,8 +28,7 @@
|
|||
#include <vector>
|
||||
#include "pdu-stream.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace PDU {
|
||||
namespace ACN::PDU {
|
||||
|
||||
class Pdu; // forward declare
|
||||
|
||||
|
|
@ -216,5 +215,4 @@ template <class T>
|
|||
using Handler = std::function<void(std::shared_ptr<T>)>;
|
||||
|
||||
|
||||
} // PDU
|
||||
} // ACN
|
||||
} // ACN::PDU
|
||||
|
|
|
|||
|
|
@ -32,7 +32,7 @@ static const uint32_t LIB_VERSION = (@PROJECT_VERSION_MAJOR@ << 24) |
|
|||
@PROJECT_VERSION_PATCH@;
|
||||
static constexpr char LIB_VERSION_LABEL [] = "@PROJECT_VERSION@";
|
||||
#else
|
||||
static constexpr char LIB_NAME [] = "libESTA";
|
||||
static constexpr char LIB_NAME [] = "libOpenLCP";
|
||||
static const uint32_t LIB_VERSION = 0x00010001;
|
||||
static constexpr char LIB_VERSION_LABEL [] = "0.1.1";
|
||||
#endif
|
||||
|
|
|
|||
|
|
@ -0,0 +1,16 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
dmp/component.h
|
||||
dmp/controller.h
|
||||
dmp/device.h
|
||||
dmp/event.h
|
||||
dmp/property.h
|
||||
PRIVATE
|
||||
dmp/component.cpp
|
||||
dmp/controller.cpp
|
||||
dmp/device.cpp
|
||||
dmp/dmp.cpp
|
||||
dmp/dmp.h
|
||||
dmp/event.cpp
|
||||
dmp/property.cpp
|
||||
)
|
||||
|
|
@ -0,0 +1,38 @@
|
|||
/*
|
||||
dmp/component.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "component.h"
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
/**
|
||||
* @brief Component::Component
|
||||
*/
|
||||
Component::Component(UUID::uuid cid)
|
||||
: SDT::Member(cid)
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -0,0 +1,40 @@
|
|||
/*
|
||||
dmp/component.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#include "sdt/member.h"
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
/**
|
||||
* @brief The Component class
|
||||
*/
|
||||
class Component
|
||||
: public SDT::Member
|
||||
{
|
||||
public:
|
||||
Component(UUID::uuid = UUID::uuid());
|
||||
};
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -0,0 +1,38 @@
|
|||
/*
|
||||
dmp/controller.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "controller.h"
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
/**
|
||||
* @brief Controller::Controller
|
||||
*/
|
||||
Controller::Controller(UUID::uuid cid)
|
||||
: SDT::Leader(cid)
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -0,0 +1,40 @@
|
|||
/*
|
||||
dmp/controller.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#include "sdt/leader.h"
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
/**
|
||||
* @brief The Controller class
|
||||
*/
|
||||
class Controller
|
||||
: public SDT::Leader
|
||||
{
|
||||
public:
|
||||
Controller(UUID::uuid = UUID::uuid());
|
||||
};
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -0,0 +1,37 @@
|
|||
/*
|
||||
dmp/device.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "device.h"
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
/**
|
||||
* @brief Device::Device
|
||||
*/
|
||||
Device::Device()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
/*
|
||||
dmp/device.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
class Device
|
||||
{
|
||||
public:
|
||||
Device();
|
||||
};
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -24,8 +24,7 @@
|
|||
|
||||
#include "dmp.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace DMP {
|
||||
namespace ACN::DMP {
|
||||
|
||||
/**
|
||||
* @brief range::read_
|
||||
|
|
@ -283,5 +282,4 @@ void Pdu::iStream(PDU::Stream stream)
|
|||
}
|
||||
}
|
||||
|
||||
} // DMP
|
||||
} // ACN
|
||||
} // ACN::DMP
|
||||
|
|
@ -26,11 +26,10 @@
|
|||
#include <cstdint>
|
||||
#include <memory>
|
||||
#include <vector>
|
||||
#include "pdu.h"
|
||||
#include "acn/pdu.h"
|
||||
|
||||
// Architecture for Control Networks – Device Management Protocol
|
||||
namespace ACN {
|
||||
namespace DMP {
|
||||
namespace ACN::DMP {
|
||||
|
||||
/**
|
||||
* @brief 5.1.4 Address and Data Types
|
||||
|
|
@ -209,5 +208,4 @@ public:
|
|||
};
|
||||
|
||||
|
||||
} // DMP
|
||||
} // ACN
|
||||
} // ACN::DMP
|
||||
|
|
@ -0,0 +1,37 @@
|
|||
/*
|
||||
dmp/event.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "event.h"
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
/**
|
||||
* @brief Event::Event
|
||||
*/
|
||||
Event::Event()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
/*
|
||||
dmp/event.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
class Event
|
||||
{
|
||||
public:
|
||||
Event();
|
||||
};
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -0,0 +1,37 @@
|
|||
/*
|
||||
dmp/property.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "property.h"
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
/**
|
||||
* @brief Property::Property
|
||||
*/
|
||||
Property::Property()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
/*
|
||||
dmp/property.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
namespace ACN::DMP {
|
||||
|
||||
class Property
|
||||
{
|
||||
public:
|
||||
Property();
|
||||
};
|
||||
|
||||
} // namespace ACN::DMP
|
||||
|
|
@ -0,0 +1,13 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
dmx/device.h
|
||||
dmx/patch.h
|
||||
dmx/personality.h
|
||||
dmx/universe.h
|
||||
PRIVATE
|
||||
dmx/device.cpp
|
||||
dmx/dmx.h
|
||||
dmx/patch.cpp
|
||||
dmx/personality.cpp
|
||||
dmx/universe.cpp
|
||||
)
|
||||
|
|
@ -0,0 +1,6 @@
|
|||
#include "patch.h"
|
||||
|
||||
Patch::Patch()
|
||||
{
|
||||
|
||||
}
|
||||
|
|
@ -0,0 +1,11 @@
|
|||
#ifndef PATCH_H
|
||||
#define PATCH_H
|
||||
|
||||
|
||||
class Patch
|
||||
{
|
||||
public:
|
||||
Patch();
|
||||
};
|
||||
|
||||
#endif // PATCH_H
|
||||
|
|
@ -0,0 +1,10 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
ept/client.h
|
||||
PRIVATE
|
||||
ept/broker.cpp
|
||||
ept/broker.h
|
||||
ept/client.cpp
|
||||
ept/ept.cpp
|
||||
ept/ept.h
|
||||
)
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
manager.cpp
|
||||
ept/broker.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -22,27 +22,20 @@
|
|||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "manager.h"
|
||||
#include "broker.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace LLRP {
|
||||
namespace RDMnet::EPT {
|
||||
|
||||
/**
|
||||
* @brief Manager::Manager
|
||||
* @brief Broker::Broker
|
||||
*/
|
||||
Manager::Manager()
|
||||
Broker::Broker()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace RDMnet::EPT
|
||||
|
||||
|
||||
/**
|
||||
* @brief Manager::~Manager
|
||||
*/
|
||||
Manager::~Manager()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace LLRP
|
||||
} // namespace RDMnet
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
/*
|
||||
ept/broker.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
namespace RDMnet::EPT {
|
||||
|
||||
class Broker
|
||||
{
|
||||
public:
|
||||
Broker();
|
||||
};
|
||||
|
||||
} // namespace RDMnet::EPT
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
client.cpp
|
||||
ept/client.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -24,8 +24,7 @@
|
|||
|
||||
#include "client.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace EPT {
|
||||
namespace RDMnet::EPT {
|
||||
|
||||
/**
|
||||
* @brief Client::Client
|
||||
|
|
@ -44,8 +43,7 @@ Client::~Client()
|
|||
|
||||
}
|
||||
|
||||
} // namespace EPT
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::EPT
|
||||
|
||||
|
||||
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
client.h
|
||||
ept/client.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -25,8 +25,7 @@
|
|||
|
||||
#include "ept.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace EPT {
|
||||
namespace RDMnet::EPT {
|
||||
|
||||
/**
|
||||
* @brief The EPT::Client class
|
||||
|
|
@ -38,5 +37,4 @@ public:
|
|||
virtual ~Client();
|
||||
};
|
||||
|
||||
} // namespace EPT
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::EPT
|
||||
|
|
@ -23,11 +23,10 @@
|
|||
*/
|
||||
|
||||
#include "ept.h"
|
||||
#include "rdmnet.h"
|
||||
#include "rpt.h"
|
||||
#include "rdmnet/rdmnet.h"
|
||||
#include "rpt/rpt.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace EPT {
|
||||
namespace RDMnet::EPT {
|
||||
|
||||
/**
|
||||
* @brief EPT::Pdu::Pdu
|
||||
|
|
@ -132,5 +131,4 @@ void Pdu::iStream(ACN::PDU::Stream stream)
|
|||
} // namespace STATUS
|
||||
|
||||
|
||||
} // namespace EPT
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::EPT
|
||||
|
|
@ -23,11 +23,10 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "pdu.h"
|
||||
#include "rdmnet/pdu.h"
|
||||
#include "uuid/uuid.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace EPT {
|
||||
namespace RDMnet::EPT {
|
||||
|
||||
/**
|
||||
* @brief 1.2.4 Extensible Packet Transport (EPT)
|
||||
|
|
@ -101,5 +100,4 @@ public:
|
|||
|
||||
} // namespace STATUS
|
||||
|
||||
} // namespace EPT
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::EPT
|
||||
|
|
@ -0,0 +1,10 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
llrp/manager.h
|
||||
PRIVATE
|
||||
llrp/llrp.cpp
|
||||
llrp/llrp.h
|
||||
llrp/manager.cpp
|
||||
llrp/target.cpp
|
||||
llrp/target.h
|
||||
)
|
||||
|
|
@ -23,11 +23,9 @@
|
|||
*/
|
||||
|
||||
#include "llrp.h"
|
||||
#include "rpt.h"
|
||||
#include "rdmnet.h"
|
||||
#include "rpt/rpt.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace LLRP {
|
||||
namespace RDMnet::LLRP {
|
||||
|
||||
/**
|
||||
* @brief llrp_data::iStream
|
||||
|
|
@ -215,5 +213,4 @@ void Pdu::iStream(ACN::PDU::Stream stream)
|
|||
|
||||
} // namespace ProbeReply
|
||||
|
||||
} // namespace LLRP
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::LLRP
|
||||
|
|
@ -23,14 +23,13 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "pdu.h"
|
||||
#include "rdmnet.h"
|
||||
#include "rdmnet/pdu.h"
|
||||
#include "rdmnet/rdmnet.h"
|
||||
#include "rdm/uid.h"
|
||||
#include "rdm/message.h"
|
||||
#include "uuid/uuid.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace LLRP {
|
||||
namespace RDMnet::LLRP {
|
||||
|
||||
/**
|
||||
* @brief 1.2.1 Low-Level Recovery Protocol (LLRP)
|
||||
|
|
@ -180,5 +179,4 @@ static const PID allowed_pids[] = {
|
|||
};
|
||||
} // namespace COMMAND
|
||||
|
||||
} // namespace LLRP
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::LLRP
|
||||
|
|
@ -0,0 +1,52 @@
|
|||
/*
|
||||
manager.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "manager.h"
|
||||
#include "rdmnet/rdmnet.h"
|
||||
|
||||
namespace RDMnet::LLRP {
|
||||
|
||||
/**
|
||||
* @brief Manager::Manager
|
||||
*/
|
||||
Manager::Manager(UUID::uuid cid)
|
||||
: ACN::RLP::Appliance(cid)
|
||||
{
|
||||
fctn_ = "OpenLCP LLRP Manager";
|
||||
|
||||
RlpRegisterVector(VECTOR_ROOT_LLRP, std::bind(&Manager::rlpLlrpReceiver,
|
||||
this, std::placeholders::_1));
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Broker::rlpBrokerReceiver
|
||||
* @param root
|
||||
*/
|
||||
void Manager::rlpLlrpReceiver(std::shared_ptr<ACN::RLP::Pdu> root)
|
||||
{
|
||||
(void)root;
|
||||
}
|
||||
|
||||
} // namespace RDMnet::LLRP
|
||||
|
|
@ -23,11 +23,9 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "rdmnet.h"
|
||||
#include "llrp.h"
|
||||
#include "rlp/appliance.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace LLRP {
|
||||
namespace RDMnet::LLRP {
|
||||
|
||||
/**
|
||||
* @brief 5.1.1 LLRP Manager
|
||||
|
|
@ -36,14 +34,15 @@ namespace LLRP {
|
|||
* configuration tool equipment.
|
||||
*/
|
||||
class Manager
|
||||
: public ACN::RLP::Appliance
|
||||
{
|
||||
public:
|
||||
Manager();
|
||||
virtual ~Manager();
|
||||
Manager(UUID::uuid = UUID::uuid());
|
||||
|
||||
void rlpLlrpReceiver(std::shared_ptr<ACN::RLP::Pdu>);
|
||||
|
||||
virtual void sendProbeRequest() {};
|
||||
virtual void receiveProbeReply() {};
|
||||
};
|
||||
|
||||
} // namespace LLRP
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::LLRP
|
||||
|
|
@ -24,8 +24,7 @@
|
|||
|
||||
#include "target.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace LLRP {
|
||||
namespace RDMnet::LLRP {
|
||||
|
||||
/**
|
||||
* @brief Target::Target
|
||||
|
|
@ -84,5 +83,4 @@ void Target::receiveRdmCommand(std::shared_ptr<RPT::COMMAND::Pdu> pdu)
|
|||
return receiveRDM(RDM::MsgPtr(&data->message));
|
||||
}
|
||||
|
||||
} // namespace LLRP
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::LLRP
|
||||
|
|
@ -23,12 +23,10 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "rdmnet.h"
|
||||
#include "rpt.h"
|
||||
#include "rpt/rpt.h"
|
||||
#include "llrp.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace LLRP {
|
||||
namespace RDMnet::LLRP {
|
||||
|
||||
/**
|
||||
* @brief 5.1.2 LLRP Target
|
||||
|
|
@ -52,5 +50,4 @@ public:
|
|||
virtual void receiveRDM(const RDM::MsgPtr) = 0;
|
||||
};
|
||||
|
||||
} // namespace LLRP
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::LLRP
|
||||
|
|
@ -0,0 +1,12 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PRIVATE
|
||||
otp/advertisement.cpp
|
||||
otp/advertisement.h
|
||||
otp/base.cpp
|
||||
otp/base.h
|
||||
otp/otp.h
|
||||
otp/pdu.cpp
|
||||
otp/pdu.h
|
||||
otp/transform.cpp
|
||||
otp/transform.h
|
||||
)
|
||||
|
|
@ -1,13 +1,9 @@
|
|||
cmake_minimum_required(VERSION 3.14)
|
||||
|
||||
project(QsACNNode VERSION 0.1 LANGUAGES CXX)
|
||||
|
||||
set(CMAKE_AUTOUIC ON)
|
||||
set(CMAKE_AUTOMOC ON)
|
||||
set(CMAKE_AUTORCC ON)
|
||||
cmake_minimum_required(VERSION 3.20)
|
||||
|
||||
set(CMAKE_CXX_STANDARD 17)
|
||||
set(CMAKE_CXX_STANDARD_REQUIRED ON)
|
||||
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -fno-rtti")
|
||||
if (CMAKE_BUILD_TYPE STREQUAL "Debug")
|
||||
set(CMAKE_CXX_FLAGS_DEBUG "${CMAKE_CXX_FLAGS_DEBUG} -D_GLIBCXX_DEBUG")
|
||||
endif()
|
||||
|
|
@ -15,18 +11,23 @@ endif()
|
|||
find_package(QT NAMES Qt6 Qt5 COMPONENTS Network Gui REQUIRED)
|
||||
find_package(Qt${QT_VERSION_MAJOR} COMPONENTS Network Gui REQUIRED)
|
||||
|
||||
add_library(${PROJECT_NAME} SHARED
|
||||
qsacnnode_global.h
|
||||
qsacnnode.cpp
|
||||
qsacnnode.h
|
||||
qsacnuniverse.h
|
||||
universemodel.h
|
||||
universemodel.cpp
|
||||
add_library(${PROJECT_NAME} SHARED)
|
||||
|
||||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
qsacnnode_global.h
|
||||
qsacnnode.h
|
||||
qsacnuniverse.h
|
||||
universemodel.h
|
||||
PRIVATE
|
||||
qsacnnode.cpp
|
||||
universemodel.cpp
|
||||
)
|
||||
|
||||
target_link_libraries(${PROJECT_NAME} PUBLIC Qt${QT_VERSION_MAJOR}::Network Qt${QT_VERSION_MAJOR}::Gui)
|
||||
target_link_libraries(${PROJECT_NAME} PUBLIC ESTA)
|
||||
target_link_libraries(${PROJECT_NAME} PUBLIC
|
||||
Qt${QT_VERSION_MAJOR}::Network
|
||||
Qt${QT_VERSION_MAJOR}::Gui
|
||||
OpenLCP)
|
||||
|
||||
target_compile_definitions(${PROJECT_NAME} PUBLIC ${PROJECT_NAME}_LIBRARY)
|
||||
target_include_directories(${PROJECT_NAME} PUBLIC ${CMAKE_CURRENT_SOURCE_DIR})
|
||||
|
||||
target_compile_definitions(${PROJECT_NAME} PUBLIC QT_LIBRARY)
|
||||
|
|
|
|||
|
|
@ -14,7 +14,7 @@ QSacnNode::QSacnNode(QObject *parent, QUuid cid)
|
|||
: Appliance(UUID::uuid(cid.toString().toStdString()))
|
||||
, QUdpSocket(parent)
|
||||
{
|
||||
fctn_ = "libESTA QSacnNode";
|
||||
fctn_ = "OpenLCP QSacnNode";
|
||||
|
||||
bind(QHostAddress::AnyIPv4, SACN::ACN_SDT_MULTICAST_PORT);
|
||||
|
||||
|
|
|
|||
|
|
@ -0,0 +1,23 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
rdm/controller.h
|
||||
rdm/device.h
|
||||
rdm/message.h
|
||||
rdm/parameter.h
|
||||
rdm/responder.h
|
||||
rdm/sensor.h
|
||||
rdm/status.h
|
||||
PRIVATE
|
||||
rdm/controller.cpp
|
||||
rdm/device.cpp
|
||||
rdm/E1.37-1.h
|
||||
rdm/E1.37-2.h
|
||||
rdm/E1.37-7.h
|
||||
rdm/message.cpp
|
||||
rdm/parameter.cpp
|
||||
rdm/rdm.cpp
|
||||
rdm/rdm.h
|
||||
rdm/responder.cpp
|
||||
rdm/sensor.cpp
|
||||
rdm/uid.h
|
||||
)
|
||||
|
|
@ -0,0 +1,21 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
rdmnet/broker.h
|
||||
rdmnet/controller.h
|
||||
rdmnet/device.h
|
||||
PRIVATE
|
||||
rdmnet/broker-protocol.cpp
|
||||
rdmnet/broker-protocol.h
|
||||
rdmnet/broker.cpp
|
||||
rdmnet/controller.cpp
|
||||
rdmnet/device.cpp
|
||||
rdmnet/implementation.cpp
|
||||
rdmnet/implementation.h
|
||||
rdmnet/pdu.cpp
|
||||
rdmnet/pdu.h
|
||||
rdmnet/rdmnet.h
|
||||
)
|
||||
|
||||
include(ept/CMakeLists.txt)
|
||||
include(llrp/CMakeLists.txt)
|
||||
include(rpt/CMakeLists.txt)
|
||||
|
|
@ -27,8 +27,7 @@
|
|||
#include "rdm/uid.h"
|
||||
#include "uuid/uuid.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace BrokerProtocol {
|
||||
namespace RDMnet::BrokerProtocol {
|
||||
|
||||
/**
|
||||
* @brief 1.2.2 Broker Protocol
|
||||
|
|
@ -296,5 +295,4 @@ struct disconnect_data
|
|||
};
|
||||
|
||||
|
||||
} // namespace BrokerProtocol
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::BrokerProtocol
|
||||
|
|
|
|||
|
|
@ -29,11 +29,12 @@ namespace RDMnet {
|
|||
/**
|
||||
* @brief Broker::Broker
|
||||
*/
|
||||
Broker::Broker(UUID::uuid cid)
|
||||
: ACN::Appliance(cid)
|
||||
, LLRP::Target()
|
||||
Broker::Broker(UUID::uuid cid, RDM::UID uid)
|
||||
: Implementation(cid, uid)
|
||||
, EPT::Broker()
|
||||
, RPT::Broker()
|
||||
{
|
||||
fctn_ = "libESTA RDMnet Broker";
|
||||
fctn_ = "OpenLCP RDMnet Broker";
|
||||
|
||||
RlpRegisterVector(VECTOR_ROOT_BROKER, std::bind(&Broker::rlpBrokerReceiver,
|
||||
this, std::placeholders::_1));
|
||||
|
|
@ -41,20 +42,12 @@ Broker::Broker(UUID::uuid cid)
|
|||
|
||||
|
||||
/**
|
||||
* @brief Broker::~Broker
|
||||
* @brief Broker::rlpBrokerReceiver
|
||||
* @param root
|
||||
*/
|
||||
Broker::~Broker()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
|
||||
void Broker::rlpBrokerReceiver(std::shared_ptr<ACN::RLP::Pdu> root)
|
||||
{
|
||||
root->createDataBlock<BrokerProtocol::Pdu>();
|
||||
// a PDU::Block is guaranteed to have been instantiated, but if the input
|
||||
// stream failed, it will not list any PDU. OK to loop without checking
|
||||
// the state of the stream.
|
||||
auto block = static_cast<ACN::PDU::Block<BrokerProtocol::Pdu>*>(root->data());
|
||||
for(auto const &frame : *block->pdu)
|
||||
{
|
||||
|
|
|
|||
|
|
@ -23,10 +23,9 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "acn/appliance.h"
|
||||
#include "rdmnet.h"
|
||||
#include "rpt.h"
|
||||
#include "target.h"
|
||||
#include "implementation.h"
|
||||
#include "ept/broker.h"
|
||||
#include "rpt/broker.h"
|
||||
|
||||
namespace RDMnet {
|
||||
|
||||
|
|
@ -34,16 +33,15 @@ namespace RDMnet {
|
|||
* @brief The Broker class
|
||||
*/
|
||||
class Broker
|
||||
: public virtual ACN::Appliance
|
||||
, public LLRP::Target
|
||||
: public Implementation
|
||||
, public EPT::Broker
|
||||
, public RPT::Broker
|
||||
{
|
||||
public:
|
||||
Broker(UUID::uuid = UUID::uuid());
|
||||
virtual ~Broker();
|
||||
Broker(UUID::uuid = UUID::uuid(), RDM::UID = RDM::UID());
|
||||
|
||||
void rlpBrokerReceiver(std::shared_ptr<ACN::RLP::Pdu>);
|
||||
|
||||
|
||||
private:
|
||||
/// @brief 6.2.1.1 Broker Scope
|
||||
/// A Broker shall participate in a single Scope at a time.
|
||||
|
|
|
|||
|
|
@ -28,21 +28,25 @@ namespace RDMnet {
|
|||
/**
|
||||
* @brief Controller::Controller
|
||||
*/
|
||||
Controller::Controller(UUID::uuid cid)
|
||||
: Component(cid)
|
||||
Controller::Controller(UUID::uuid cid, RDM::UID uid)
|
||||
: Implementation(cid, uid)
|
||||
, RDM::Controller()
|
||||
, LLRP::Target()
|
||||
, RPT::Controller()
|
||||
{
|
||||
fctn_ = "libESTA RDMnet Controller";
|
||||
fctn_ = "OpenLCP RDMnet Controller";
|
||||
|
||||
RlpRegisterVector(VECTOR_ROOT_RPT, std::bind(&Controller::rlpRptReceiver,
|
||||
this, std::placeholders::_1));
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Controller::~Controller
|
||||
* @brief Controller::rlpRptReceiver
|
||||
* @param root
|
||||
*/
|
||||
Controller::~Controller()
|
||||
void Controller::rlpRptReceiver(std::shared_ptr<ACN::RLP::Pdu> root)
|
||||
{
|
||||
|
||||
(void)root;
|
||||
}
|
||||
|
||||
} // namespace RDMnet
|
||||
|
|
|
|||
|
|
@ -23,11 +23,9 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "component.h"
|
||||
#include "implementation.h"
|
||||
#include "rdm/controller.h"
|
||||
#include "rdmnet.h"
|
||||
#include "rpt.h"
|
||||
#include "target.h"
|
||||
#include "rpt/controller.h"
|
||||
|
||||
namespace RDMnet {
|
||||
|
||||
|
|
@ -35,13 +33,14 @@ namespace RDMnet {
|
|||
* @brief The Controller class
|
||||
*/
|
||||
class Controller
|
||||
: public Component
|
||||
: public Implementation
|
||||
, public RDM::Controller
|
||||
, public LLRP::Target
|
||||
, public RPT::Controller
|
||||
{
|
||||
public:
|
||||
Controller(UUID::uuid = UUID::uuid());
|
||||
virtual ~Controller();
|
||||
Controller(UUID::uuid = UUID::uuid(), RDM::UID = RDM::UID());
|
||||
|
||||
void rlpRptReceiver(std::shared_ptr<ACN::RLP::Pdu>);
|
||||
};
|
||||
|
||||
} // namespace RDMnet
|
||||
|
|
|
|||
|
|
@ -28,27 +28,26 @@ namespace RDMnet {
|
|||
/**
|
||||
* @brief Controller::Controller
|
||||
*/
|
||||
Device::Device(UUID::uuid cid, UUID::uuid rid, RDM::UID uid)
|
||||
: Component(cid)
|
||||
, RDM::Responder(uid)
|
||||
, LLRP::Target()
|
||||
Device::Device(UUID::uuid cid, RDM::UID uid, UUID::uuid rid)
|
||||
: Implementation(cid, uid)
|
||||
, RPT::Device()
|
||||
, rid_(rid)
|
||||
{
|
||||
fctn_ = "libESTA RDMnet Component";
|
||||
fctn_ = "OpenLCP RDMnet Device";
|
||||
|
||||
RlpRegisterVector(VECTOR_ROOT_RPT, std::bind(&Device::rlpRptReceiver,
|
||||
this, std::placeholders::_1));
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Controller::~Controller
|
||||
* @brief Device::rlpRptReceiver
|
||||
* @param root
|
||||
*/
|
||||
Device::~Device()
|
||||
void Device::rlpRptReceiver(std::shared_ptr<ACN::RLP::Pdu> root)
|
||||
{
|
||||
|
||||
(void)root;
|
||||
}
|
||||
|
||||
void Device::receiveRDM(const RDM::MsgPtr message)
|
||||
{
|
||||
RDM::Responder::receive(message);
|
||||
}
|
||||
|
||||
} // namespace RDMnet
|
||||
|
|
|
|||
|
|
@ -23,11 +23,8 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "component.h"
|
||||
#include "rdm/responder.h"
|
||||
#include "rdmnet.h"
|
||||
#include "rpt.h"
|
||||
#include "target.h"
|
||||
#include "implementation.h"
|
||||
#include "rpt/device.h"
|
||||
|
||||
namespace RDMnet {
|
||||
|
||||
|
|
@ -35,17 +32,15 @@ namespace RDMnet {
|
|||
* @brief The Device class
|
||||
*/
|
||||
class Device
|
||||
: public Component
|
||||
, public RDM::Responder
|
||||
, public LLRP::Target
|
||||
: public Implementation
|
||||
, public RPT::Device
|
||||
{
|
||||
public:
|
||||
Device(UUID::uuid cid = UUID::uuid(),
|
||||
UUID::uuid rid = UUID::uuid(),
|
||||
RDM::UID uid = RDM::UID());
|
||||
virtual ~Device();
|
||||
RDM::UID uid = RDM::UID(),
|
||||
UUID::uuid rid = UUID::uuid());
|
||||
|
||||
virtual void receiveRDM(const RDM::MsgPtr) override;
|
||||
void rlpRptReceiver(std::shared_ptr<ACN::RLP::Pdu>);
|
||||
|
||||
private:
|
||||
UUID::uuid rid_;
|
||||
|
|
|
|||
|
|
@ -0,0 +1,57 @@
|
|||
/*
|
||||
rdmnet/implementation.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "implementation.h"
|
||||
|
||||
namespace RDMnet {
|
||||
|
||||
/**
|
||||
* @brief Implementation::Implementation
|
||||
* @param cid
|
||||
*/
|
||||
Implementation::Implementation(UUID::uuid cid, RDM::UID uid)
|
||||
: ACN::RLP::Appliance(cid)
|
||||
, RDM::Responder(uid)
|
||||
, LLRP::Target()
|
||||
{
|
||||
fctn_ = "OpenLCP RDMnet Implementation";
|
||||
|
||||
RlpRegisterVector(VECTOR_ROOT_LLRP, std::bind(&Implementation::rlpLlrpReceiver,
|
||||
this, std::placeholders::_1));
|
||||
RlpRegisterVector(VECTOR_ROOT_EPT, std::bind(&Implementation::rlpEptReceiver,
|
||||
this, std::placeholders::_1));
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Implementation::rlpLlrpReceiver
|
||||
* @param root
|
||||
*/
|
||||
void Implementation::rlpLlrpReceiver(std::shared_ptr<ACN::RLP::Pdu> root)
|
||||
{
|
||||
(void)root;
|
||||
}
|
||||
|
||||
|
||||
} // namespace RDMnet
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
component.h
|
||||
rdmnet/implementation.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -23,36 +23,23 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "acn/component.h"
|
||||
|
||||
#include <vector>
|
||||
#include <string>
|
||||
#include "rlp/appliance.h"
|
||||
#include "rdm/responder.h"
|
||||
#include "llrp/target.h"
|
||||
|
||||
namespace RDMnet {
|
||||
|
||||
/**
|
||||
* @brief 6 Broker Protocol
|
||||
* 6.1.3 Client
|
||||
* A Client is a Component which connects to a Broker. Clients communicate
|
||||
* with other Clients which are using the same Client Protocol in the same
|
||||
* Scope via their connection to the Broker.
|
||||
*/
|
||||
|
||||
class Component
|
||||
: public ACN::Component
|
||||
class Implementation
|
||||
: public ACN::RLP::Appliance
|
||||
, public RDM::Responder
|
||||
, public LLRP::Target
|
||||
{
|
||||
public:
|
||||
Component(UUID::uuid cid = UUID::uuid())
|
||||
: ACN::Component(cid)
|
||||
{};
|
||||
virtual ~Component() {};
|
||||
Implementation(UUID::uuid = UUID::uuid(),
|
||||
RDM::UID = RDM::UID());
|
||||
|
||||
private:
|
||||
/// @brief 6.2.1 Scopes
|
||||
/// Each Component participates in one or more Scopes.
|
||||
std::vector<std::string> scopes_;
|
||||
void rlpLlrpReceiver(std::shared_ptr<ACN::RLP::Pdu>);
|
||||
virtual void rlpEptReceiver(std::shared_ptr<ACN::RLP::Pdu>) {};
|
||||
};
|
||||
|
||||
} // namespace RDMnet
|
||||
|
||||
|
||||
|
|
@ -0,0 +1,12 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
rlp/appliance.h
|
||||
PRIVATE
|
||||
rlp/appliance.cpp
|
||||
rlp/rlp.cpp
|
||||
rlp/rlp.h
|
||||
rlp/tcp.cpp
|
||||
rlp/tcp.h
|
||||
rlp/udp.cpp
|
||||
rlp/udp.h
|
||||
)
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
appliance.h
|
||||
rlp/appliance.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -24,13 +24,10 @@
|
|||
|
||||
#include "appliance.h"
|
||||
|
||||
#include "dmp.h"
|
||||
#include "sdt.h"
|
||||
#include "rlp.h"
|
||||
#include "rlp-udp.h"
|
||||
#include "rlp-tcp.h"
|
||||
#include "udp.h"
|
||||
#include "tcp.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace ACN::RLP {
|
||||
|
||||
/**
|
||||
* @brief Appliance::Appliance
|
||||
|
|
@ -39,16 +36,7 @@ namespace ACN {
|
|||
Appliance::Appliance(UUID::uuid cid)
|
||||
: Component(cid)
|
||||
{
|
||||
fctn_ = "libESTA ACN Appliance";
|
||||
|
||||
/**
|
||||
* 1.3.1. Recursive use of PDU Format in Other Protocols
|
||||
* ... within ACN as currently specified, there is just one higher layer
|
||||
* protocol defined which interfaces directly to the root layer:
|
||||
* Session Data Transport
|
||||
*/
|
||||
RlpRegisterVector(SDT::SDT_PROTOCOL_ID, std::bind(&Appliance::SdtReceiver,
|
||||
this, std::placeholders::_1));
|
||||
fctn_ = "OpenLCP ACN Appliance";
|
||||
};
|
||||
|
||||
|
||||
|
|
@ -117,42 +105,4 @@ void Appliance::RlpRegisterVector(uint32_t vect, PDU::Handler<RLP::Pdu> handle)
|
|||
rlp_vectors_[vect].push_back(handle);
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Appliance::SdtReceiver
|
||||
* @param rlp
|
||||
*/
|
||||
void Appliance::SdtReceiver(std::shared_ptr<RLP::Pdu> root)
|
||||
{
|
||||
root->createDataBlock<SDT::Pdu>();
|
||||
auto block = static_cast<PDU::Block<SDT::Pdu>*>(root->data());
|
||||
|
||||
for(auto const &sdt : *block->pdu) {
|
||||
switch(sdt->vector()) {
|
||||
/// TODO: handle SDT
|
||||
default:
|
||||
break;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Appliance::DmpReceiver
|
||||
* @param rlp
|
||||
*/
|
||||
void Appliance::DmpReceiver(std::shared_ptr<RLP::Pdu> root)
|
||||
{
|
||||
root->createDataBlock<DMP::Pdu>();
|
||||
auto block = static_cast<PDU::Block<DMP::Pdu>*>(root->data());
|
||||
|
||||
for(auto const &dmp : *block->pdu) {
|
||||
switch(dmp->vector()) {
|
||||
/// TODO: DMP in root
|
||||
default:
|
||||
break;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
}; // ACN
|
||||
}; // ACN::RLP
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
appliance.h
|
||||
rlp/appliance.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -23,11 +23,9 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "component.h"
|
||||
#include "pdu.h"
|
||||
#include "acn/component.h"
|
||||
#include "acn/pdu.h"
|
||||
#include "rlp.h"
|
||||
#include "sdt-session.h"
|
||||
#include "uuid/uuid.h"
|
||||
|
||||
#include <map>
|
||||
#include <memory>
|
||||
|
|
@ -37,7 +35,7 @@
|
|||
// device. See also appliance.
|
||||
|
||||
|
||||
namespace ACN {
|
||||
namespace ACN::RLP {
|
||||
|
||||
/**
|
||||
* @brief The Appliance class
|
||||
|
|
@ -61,27 +59,11 @@ public:
|
|||
virtual void TcpPacketReceiver(PDU::Stream);
|
||||
|
||||
protected:
|
||||
|
||||
// RLP
|
||||
void RlpReceiver(std::shared_ptr<RLP::Pdu>);
|
||||
void RlpRegisterVector(uint32_t, PDU::Handler<RLP::Pdu>);
|
||||
|
||||
// RLP->SDT frames
|
||||
virtual void SdtReceiver(std::shared_ptr<RLP::Pdu>);
|
||||
// SDT 4.4 SDT Base Layer Messages
|
||||
// Join, Get Sessions, and Sessions are ad-hoc messages, that is, they are
|
||||
// not sent within channels. These messages identify their intended recipient
|
||||
// by CID.
|
||||
virtual void SdtJoinSession() {};
|
||||
virtual void SdtGetSessions() {};
|
||||
virtual void SdtSessions() {};
|
||||
|
||||
// RLP->DMP frames
|
||||
virtual void DmpReceiver(std::shared_ptr<RLP::Pdu>);
|
||||
|
||||
private:
|
||||
std::map<uint32_t, std::vector<PDU::Handler<RLP::Pdu>>> rlp_vectors_;
|
||||
std::vector<std::shared_ptr<SDT::Session>> sdt_sessions_;
|
||||
};
|
||||
|
||||
}; // ACN
|
||||
}; // ACN::RLP
|
||||
|
|
@ -24,8 +24,7 @@
|
|||
|
||||
#include "rlp.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace RLP {
|
||||
namespace ACN::RLP {
|
||||
|
||||
/**
|
||||
* @brief rlp_header::streamSize
|
||||
|
|
@ -81,5 +80,4 @@ void Pdu::iStream(PDU::Stream stream)
|
|||
// protocol dependent data segment // data
|
||||
}
|
||||
|
||||
} // RLP
|
||||
} // ACN
|
||||
} // ACN::RLP
|
||||
|
|
@ -25,11 +25,10 @@
|
|||
|
||||
#include <cstdint>
|
||||
#include <memory>
|
||||
#include "pdu.h"
|
||||
#include "acn/pdu.h"
|
||||
#include "uuid/uuid.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace RLP {
|
||||
namespace ACN::RLP {
|
||||
|
||||
/**
|
||||
* @brief 2.6.1.2.2. Header Field in Root Layer PDUs
|
||||
|
|
@ -58,5 +57,4 @@ public:
|
|||
void iStream(PDU::Stream) override;
|
||||
};
|
||||
|
||||
} // RLP
|
||||
} // ACN
|
||||
} // ACN::RLP
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
rlp-tcp.cpp
|
||||
rlp/tcp.cpp
|
||||
|
||||
Copyright (c) 2020 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -22,13 +22,11 @@
|
|||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "rlp-tcp.h"
|
||||
#include "tcp.h"
|
||||
|
||||
#include <cstring>
|
||||
|
||||
namespace ACN {
|
||||
namespace RLP {
|
||||
namespace TCP {
|
||||
namespace ACN::RLP::TCP {
|
||||
|
||||
/**
|
||||
* @brief preamble_t::preamble_t
|
||||
|
|
@ -78,6 +76,4 @@ void transport::oStream(PDU::Stream stream) const
|
|||
*stream << pdu;
|
||||
}
|
||||
|
||||
} // TCP
|
||||
} // RLP
|
||||
} // ACN
|
||||
} // ACN::RLP::TCP
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
rlp-tcp.h
|
||||
rlp/tcp.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -25,13 +25,11 @@
|
|||
|
||||
#include <cstdint>
|
||||
#include "rlp.h"
|
||||
#include "pdu.h"
|
||||
#include "acn/pdu.h"
|
||||
|
||||
// EPI 33. ACN Root Layer Protocol Operation on TCP
|
||||
|
||||
namespace ACN {
|
||||
namespace RLP {
|
||||
namespace TCP {
|
||||
namespace ACN::RLP::TCP {
|
||||
|
||||
/**
|
||||
* @brief 3. Frame Preamble Format
|
||||
|
|
@ -66,6 +64,4 @@ static const uint8_t ACN_PACKET_IDENTIFIER[] = { 0x41, 0x53, 0x43, 0x2d,
|
|||
*/
|
||||
static const uint32_t INDEFINITE = 0xffffffff;
|
||||
|
||||
} // TCP
|
||||
} // RLP
|
||||
} // ACN
|
||||
} // ACN::RLP::TCP
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
rlp-udp.cpp
|
||||
rlp/udp.cpp
|
||||
|
||||
Copyright (c) 2020 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -22,13 +22,11 @@
|
|||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "rlp-udp.h"
|
||||
#include "udp.h"
|
||||
|
||||
#include <cstring>
|
||||
|
||||
namespace ACN {
|
||||
namespace RLP {
|
||||
namespace UDP {
|
||||
namespace ACN::RLP::UDP {
|
||||
|
||||
/**
|
||||
* @brief preamble::preamble
|
||||
|
|
@ -102,6 +100,4 @@ void transport::oStream(PDU::Stream stream) const
|
|||
*stream << pdu;
|
||||
}
|
||||
|
||||
} // UDP
|
||||
} // RLP
|
||||
} // ACN
|
||||
} // ACN::RLP::UDP
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
rlp-udp.h
|
||||
rlp/udp.h
|
||||
|
||||
Copyright (c) 2020 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -24,13 +24,11 @@
|
|||
#pragma once
|
||||
|
||||
#include "rlp.h"
|
||||
#include "pdu.h"
|
||||
#include "acn/pdu.h"
|
||||
|
||||
// ACN EPI 17. ACN Root Layer Protocol Operation on UDP
|
||||
|
||||
namespace ACN {
|
||||
namespace RLP {
|
||||
namespace UDP {
|
||||
namespace ACN::RLP::UDP {
|
||||
|
||||
/**
|
||||
* @brief ACN_PACKET_IDENTIFIER
|
||||
|
|
@ -68,6 +66,4 @@ struct transport
|
|||
};
|
||||
|
||||
|
||||
} // UDP
|
||||
} // RLP
|
||||
} // ACN
|
||||
} // ACN::RLP::UDP
|
||||
|
|
@ -0,0 +1,11 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PRIVATE
|
||||
rpt/broker.cpp
|
||||
rpt/broker.h
|
||||
rpt/controller.cpp
|
||||
rpt/controller.h
|
||||
rpt/device.cpp
|
||||
rpt/device.h
|
||||
rpt/rpt.cpp
|
||||
rpt/rpt.h
|
||||
)
|
||||
|
|
@ -0,0 +1,41 @@
|
|||
/*
|
||||
rpt/broker.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "broker.h"
|
||||
|
||||
namespace RDMnet::RPT {
|
||||
|
||||
/**
|
||||
* @brief Broker::Broker
|
||||
*/
|
||||
Broker::Broker()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace RDMnet::RPT
|
||||
|
||||
|
||||
|
||||
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
/*
|
||||
rpt/broker.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
namespace RDMnet::RPT {
|
||||
|
||||
class Broker
|
||||
{
|
||||
public:
|
||||
Broker();
|
||||
};
|
||||
|
||||
} // namespace RDMnet::RPT
|
||||
|
|
@ -0,0 +1,37 @@
|
|||
/*
|
||||
rpt/controller.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "controller.h"
|
||||
|
||||
namespace RDMnet::RPT {
|
||||
|
||||
/**
|
||||
* @brief Controller::Controller
|
||||
*/
|
||||
Controller::Controller()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace RDMnet::RPT
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
/*
|
||||
rpt/controller.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
namespace RDMnet::RPT {
|
||||
|
||||
class Controller
|
||||
{
|
||||
public:
|
||||
Controller();
|
||||
};
|
||||
|
||||
} // namespace RDMnet::RPT
|
||||
|
|
@ -0,0 +1,37 @@
|
|||
/*
|
||||
rpt/device.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "device.h"
|
||||
|
||||
namespace RDMnet::RPT {
|
||||
|
||||
/**
|
||||
* @brief Device::Device
|
||||
*/
|
||||
Device::Device()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace RDMnet::RPT
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
/*
|
||||
rpt/device.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
namespace RDMnet::RPT {
|
||||
|
||||
class Device
|
||||
{
|
||||
public:
|
||||
Device();
|
||||
};
|
||||
|
||||
} // namespace RDMnet::RPT
|
||||
|
|
@ -23,11 +23,10 @@
|
|||
*/
|
||||
|
||||
#include "config.h"
|
||||
#include "rdmnet.h"
|
||||
#include "rdmnet/rdmnet.h"
|
||||
#include "rpt.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace RPT {
|
||||
namespace RDMnet::RPT {
|
||||
|
||||
const RDM::UID DynamicUidRequest = RDM::UID(0, MY_ESTA_MANUFACTURER_ID, true);
|
||||
|
||||
|
|
@ -314,5 +313,4 @@ void rpt_data::oStream(ACN::PDU::Stream stream) const
|
|||
*stream << pdu;
|
||||
}
|
||||
|
||||
} // namespace RPT
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::RPT
|
||||
|
|
@ -23,12 +23,11 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "pdu.h"
|
||||
#include "rdmnet/pdu.h"
|
||||
#include "rdm/message.h"
|
||||
#include "rdm/uid.h"
|
||||
|
||||
namespace RDMnet {
|
||||
namespace RPT {
|
||||
namespace RDMnet::RPT {
|
||||
|
||||
/**
|
||||
* @brief 1.2.3 RDM Packet Transport (RPT)
|
||||
|
|
@ -126,6 +125,9 @@ public:
|
|||
};
|
||||
|
||||
|
||||
/**
|
||||
* @brief The command_data struct
|
||||
*/
|
||||
struct command_data
|
||||
: public ACN::PDU::pdu_data
|
||||
{
|
||||
|
|
@ -151,7 +153,9 @@ public:
|
|||
};
|
||||
|
||||
|
||||
|
||||
/**
|
||||
* @brief The rpt_header struct
|
||||
*/
|
||||
struct rpt_header
|
||||
: ACN::PDU::pdu_header
|
||||
{
|
||||
|
|
@ -166,6 +170,9 @@ struct rpt_header
|
|||
};
|
||||
|
||||
|
||||
/**
|
||||
* @brief The rpt_data struct
|
||||
*/
|
||||
struct rpt_data
|
||||
: ACN::PDU::pdu_data
|
||||
{
|
||||
|
|
@ -178,8 +185,4 @@ struct rpt_data
|
|||
void oStream(ACN::PDU::Stream) const override;
|
||||
};
|
||||
|
||||
|
||||
|
||||
|
||||
} // namespace RPT
|
||||
} // namespace RDMnet
|
||||
} // namespace RDMnet::RPT
|
||||
|
|
@ -0,0 +1,22 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
sacn/node.h
|
||||
sacn/receiver.h
|
||||
sacn/source.h
|
||||
sacn/universe.h
|
||||
sacn/provenance.h
|
||||
PRIVATE
|
||||
sacn/data.cpp
|
||||
sacn/data.h
|
||||
sacn/extended.cpp
|
||||
sacn/extended.h
|
||||
sacn/mergeproxyuniverse.cpp
|
||||
sacn/mergeproxyuniverse.h
|
||||
sacn/node.cpp
|
||||
sacn/provenance.cpp
|
||||
sacn/provenance.h
|
||||
sacn/receiver.cpp
|
||||
sacn/sacn.h
|
||||
sacn/source.cpp
|
||||
sacn/universe.cpp
|
||||
)
|
||||
|
|
@ -22,7 +22,7 @@
|
|||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "acn/dmp.h"
|
||||
#include "dmp/dmp.h"
|
||||
#include "data.h"
|
||||
|
||||
namespace SACN {
|
||||
|
|
|
|||
|
|
@ -26,8 +26,7 @@
|
|||
#include "acn/pdu.h"
|
||||
#include "sacn.h"
|
||||
|
||||
namespace SACN {
|
||||
namespace DATA {
|
||||
namespace SACN::DATA {
|
||||
|
||||
/**
|
||||
* @brief Table 6-1: E1.31 Data Packet Framing Layer
|
||||
|
|
@ -67,5 +66,4 @@ public:
|
|||
void iStream(ACN::PDU::Stream) override;
|
||||
};
|
||||
|
||||
} // DATA
|
||||
} // SACN
|
||||
} // SACN::DATA
|
||||
|
|
|
|||
|
|
@ -22,7 +22,7 @@
|
|||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "acn/rlp.h"
|
||||
#include "rlp/rlp.h"
|
||||
#include "extended.h"
|
||||
#include "config.h"
|
||||
|
||||
|
|
|
|||
|
|
@ -28,8 +28,7 @@
|
|||
#include "uuid/uuid.h"
|
||||
#include <functional>
|
||||
|
||||
namespace SACN {
|
||||
namespace EXTENDED {
|
||||
namespace SACN::EXTENDED {
|
||||
|
||||
/**
|
||||
* @brief 6.3 E1.31 Synchronization Packet Framing Layer
|
||||
|
|
@ -131,5 +130,4 @@ public:
|
|||
|
||||
|
||||
} // DISCOVERY
|
||||
} // EXTENDED
|
||||
} // SACN
|
||||
} // SACN::EXTENDED
|
||||
|
|
|
|||
|
|
@ -0,0 +1,256 @@
|
|||
/*
|
||||
mergeproxyuniverse.cpp
|
||||
|
||||
Copyright (c) 2020 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "mergeproxyuniverse.h"
|
||||
|
||||
namespace SACN {
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::MergeProxyUniverse
|
||||
*/
|
||||
MergeProxyUniverse::MergeProxyUniverse()
|
||||
: SACN::Universe()
|
||||
{
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::~MergeProxyUniverse
|
||||
*/
|
||||
MergeProxyUniverse::~MergeProxyUniverse()
|
||||
{
|
||||
for (auto& [_, universe] : sources_)
|
||||
delete universe;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::sources
|
||||
* @return
|
||||
*/
|
||||
const std::vector<Provenance> MergeProxyUniverse::sources() const
|
||||
{
|
||||
std::vector<Provenance> keys;
|
||||
for (const auto& [key, _] : sources_)
|
||||
keys.push_back(key);
|
||||
return keys;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::sourceUniverse
|
||||
* @return
|
||||
*/
|
||||
Universe* MergeProxyUniverse::sourceUniverse(const Provenance &src)
|
||||
{
|
||||
if (!hasSourceUniverse(src))
|
||||
newProvenance_(src);
|
||||
return sources_.at(src);
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::hasSourceUniverse
|
||||
* @return
|
||||
*/
|
||||
bool MergeProxyUniverse::hasSourceUniverse(const Provenance& src) const
|
||||
{
|
||||
if (sources_.count(src))
|
||||
return true;
|
||||
return false;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::hassources
|
||||
* @return
|
||||
*/
|
||||
bool MergeProxyUniverse::hasSources() const
|
||||
{
|
||||
if (sources_.size())
|
||||
return true;
|
||||
return false;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::deleteSourceUniverse
|
||||
* @return
|
||||
*/
|
||||
void MergeProxyUniverse::deleteSourceUniverse(const Provenance& src)
|
||||
{
|
||||
if (sources_.count(src))
|
||||
{
|
||||
delete sources_.at(src);
|
||||
sources_.erase(src);
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::addSourceUniverse
|
||||
*/
|
||||
void MergeProxyUniverse::addSourceUniverse(Universe* universe)
|
||||
{
|
||||
sources_.at(*universe->source()) = universe;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::dataChangedNotifier
|
||||
* @param universe
|
||||
*/
|
||||
void MergeProxyUniverse::dataChangedNotifier(DMX::Universe* dmx)
|
||||
{
|
||||
auto sacn = static_cast<SACN::Universe*>(dmx);
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return;
|
||||
if (sacn->source() == universe->source())
|
||||
for (const auto &cb : callbacks_)
|
||||
cb(this);
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::isSyncronized
|
||||
* @return
|
||||
*/
|
||||
bool MergeProxyUniverse::isSyncronized() const
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return false;
|
||||
return universe->isSyncronized();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::source
|
||||
* @return
|
||||
*/
|
||||
std::shared_ptr<Provenance> MergeProxyUniverse::source() const
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return nullptr;
|
||||
return universe->source();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::set
|
||||
* @param pdu
|
||||
* @param source
|
||||
*/
|
||||
void MergeProxyUniverse::set(std::shared_ptr<ACN::DMP::Pdu> pdu,
|
||||
std::shared_ptr<Provenance> src)
|
||||
{
|
||||
if (!sources_.count(*src))
|
||||
newProvenance_(*src);
|
||||
|
||||
sources_.at(*src)->set(pdu, src);
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::synchronize
|
||||
*/
|
||||
void MergeProxyUniverse::synchronize()
|
||||
{
|
||||
for ( auto& [_, uni] : sources_)
|
||||
uni->synchronize();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::data
|
||||
* @return
|
||||
*/
|
||||
const DMX::DimmerData * MergeProxyUniverse::data() const
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return nullptr;
|
||||
return universe->data();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::slot
|
||||
* @param s
|
||||
* @return
|
||||
*/
|
||||
uint8_t MergeProxyUniverse::slot(const uint16_t s)
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return 0;
|
||||
return universe->slot(s);
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::rxRate
|
||||
* @return
|
||||
*/
|
||||
double MergeProxyUniverse::rxRate()
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return 0.0;
|
||||
return universe->rxRate();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::dominant_
|
||||
* @return
|
||||
*/
|
||||
Universe* MergeProxyUniverse::dominant_() const
|
||||
{
|
||||
Universe* ret = nullptr;
|
||||
for (auto& [_, uni] : sources_)
|
||||
{
|
||||
if (uni->rxRate() < (DMX::E111_DATA_LOSS_TIMEOUT / 1000.0))
|
||||
continue; // stale universes cannot be dominant
|
||||
if (!ret || uni->source()->priority() > ret->source()->priority())
|
||||
ret = uni;
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::newSource_
|
||||
* @param src
|
||||
*/
|
||||
void MergeProxyUniverse::newProvenance_(const Provenance &src)
|
||||
{
|
||||
sources_.emplace(src, new Universe());
|
||||
sources_.at(src)->onData(std::bind(&SACN::MergeProxyUniverse::dataChangedNotifier,
|
||||
this, std::placeholders::_1));
|
||||
}
|
||||
|
||||
} // namespace SACN
|
||||
|
|
@ -0,0 +1,75 @@
|
|||
/*
|
||||
mergeproxyuniverse.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#include "universe.h"
|
||||
|
||||
#include <memory>
|
||||
#include <unordered_map>
|
||||
|
||||
namespace SACN {
|
||||
|
||||
/**
|
||||
* @brief The MergeProxyUniverse class
|
||||
* 6.2.3.1 Multiple Sources at Highest Priority
|
||||
* It is possible for there to be multiple sources, all transmitting data
|
||||
* at the highest currently active priority for a given universe. When this
|
||||
* occurs, receivers must handle these sources in some way.
|
||||
*/
|
||||
class MergeProxyUniverse
|
||||
: public SACN::Universe
|
||||
{
|
||||
public:
|
||||
MergeProxyUniverse();
|
||||
~MergeProxyUniverse();
|
||||
|
||||
// Source universes:
|
||||
const std::vector<Provenance> sources() const;
|
||||
Universe* sourceUniverse(const Provenance&);
|
||||
bool hasSourceUniverse(const Provenance&) const;
|
||||
bool hasSources() const;
|
||||
void deleteSourceUniverse(const Provenance&);
|
||||
void addSourceUniverse(Universe *);
|
||||
void dataChangedNotifier(DMX::Universe* universe);
|
||||
|
||||
// SACN::Universe overrides:
|
||||
bool isSyncronized() const override;
|
||||
std::shared_ptr<Provenance> source() const override;
|
||||
void set(std::shared_ptr<ACN::DMP::Pdu>, std::shared_ptr<Provenance>) override;
|
||||
void setProvenance(std::shared_ptr<Provenance>) override {};
|
||||
void synchronize() override;
|
||||
|
||||
// DMX::Universe Overrides:
|
||||
const DMX::DimmerData *data() const override;
|
||||
uint8_t slot(const uint16_t) override;
|
||||
double rxRate() override;
|
||||
|
||||
private:
|
||||
std::unordered_map<Provenance, SACN::Universe*> sources_;
|
||||
|
||||
Universe* dominant_() const;
|
||||
void newProvenance_(const Provenance&);
|
||||
};
|
||||
|
||||
} // SACN namespace
|
||||
|
|
@ -5,7 +5,7 @@ namespace SACN {
|
|||
Node::Node(UUID::uuid cid)
|
||||
: Appliance(cid)
|
||||
{
|
||||
fctn_ = "libESTA sACN Node";
|
||||
fctn_ = "OpenLCP sACN Node";
|
||||
}
|
||||
|
||||
} // SACN
|
||||
|
|
|
|||
|
|
@ -0,0 +1,75 @@
|
|||
/*
|
||||
provenance.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "provenance.h"
|
||||
#include "rlp/rlp.h"
|
||||
|
||||
namespace SACN {
|
||||
|
||||
|
||||
/**
|
||||
* @brief Provenance::Provenance
|
||||
*/
|
||||
Provenance::Provenance()
|
||||
: cid_(UUID::uuid())
|
||||
, description_(std::string())
|
||||
, universe_(0)
|
||||
, priority_(100)
|
||||
, sync_address_(0)
|
||||
, options_(0)
|
||||
{}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Construct a Universe Source from an sACN frame PDU
|
||||
* @param pdu
|
||||
*/
|
||||
Provenance::Provenance(std::shared_ptr<DATA::Pdu> pdu)
|
||||
{
|
||||
auto root_header = static_cast<ACN::RLP::rlp_header*>(pdu->parent()->header());
|
||||
auto frame_header = static_cast<DATA::data_header*>(pdu->header());
|
||||
|
||||
cid_ = root_header->cid;
|
||||
description_ = frame_header->source_name;
|
||||
universe_ = frame_header->universe;
|
||||
priority_ = frame_header->priority;
|
||||
sync_address_ = frame_header->sync_address;
|
||||
options_ = frame_header->options;
|
||||
};
|
||||
|
||||
|
||||
/**
|
||||
* @brief operator ==
|
||||
* @param a
|
||||
* @param b
|
||||
* @return
|
||||
*/
|
||||
bool operator== (const Provenance& a, const Provenance& b)
|
||||
{
|
||||
return (std::hash<Provenance>{}(a) == std::hash<Provenance>{}(b));
|
||||
}
|
||||
|
||||
|
||||
|
||||
} // namespace SACN
|
||||
|
|
@ -0,0 +1,97 @@
|
|||
/*
|
||||
provenance.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#include "data.h"
|
||||
#include "uuid/uuid.h"
|
||||
|
||||
#include <cstdint>
|
||||
#include <string>
|
||||
|
||||
namespace SACN {
|
||||
|
||||
/**
|
||||
* @brief The Provenance class
|
||||
*/
|
||||
class Provenance
|
||||
{
|
||||
public:
|
||||
Provenance();
|
||||
Provenance(std::shared_ptr<DATA::Pdu>);
|
||||
|
||||
const UUID::uuid CID() const {return cid_;};
|
||||
const std::string description() const {return description_;}
|
||||
uint16_t universe() const {return universe_;}
|
||||
uint8_t priority() const {return priority_;}
|
||||
uint16_t syncAddress() const {return sync_address_;}
|
||||
bool isTerminated() const {return options_
|
||||
& DATA::STREAM_TERMINATED;}
|
||||
bool isPreview() const {return options_
|
||||
& DATA::PREVIEW_DATA;}
|
||||
bool isForced() const {return options_
|
||||
& DATA::FORCE_SYNCHRONIZATION;}
|
||||
|
||||
friend bool operator== (const Provenance& a, const Provenance& b);
|
||||
|
||||
void setCID(UUID::uuid cid) { cid_ = cid; }
|
||||
void setDescription(std::string desc) { description_ = desc; }
|
||||
void setOptions(uint8_t o) { options_ = o; }
|
||||
void setUniverse(uint16_t n) { if (n >= 1 && n <= 63999) universe_ = n; }
|
||||
void setSyncAddress(uint16_t a) { if (a >= 1 && a <= 63999) sync_address_ = a; }
|
||||
void setPriority(uint8_t p) { if (p <= 200) priority_ = p; }
|
||||
|
||||
private:
|
||||
UUID::uuid cid_;
|
||||
std::string description_;
|
||||
uint16_t universe_;
|
||||
uint8_t priority_;
|
||||
uint16_t sync_address_;
|
||||
uint8_t options_;
|
||||
};
|
||||
} // SACN namespace
|
||||
|
||||
|
||||
namespace std
|
||||
{
|
||||
template<>
|
||||
/**
|
||||
* @brief The hash struct specilizaton for SACN::Provenance
|
||||
*/
|
||||
struct hash<SACN::Provenance>
|
||||
{
|
||||
/**
|
||||
* @brief operator ()
|
||||
* @param src
|
||||
* @return
|
||||
*/
|
||||
size_t operator()(SACN::Provenance const& src) const noexcept
|
||||
{
|
||||
size_t h1 = hash<string>{}(src.description());
|
||||
size_t h2 = hash<UUID::uuid>{}(src.CID());
|
||||
size_t h3 = hash<int>{}(src.priority());
|
||||
size_t h = h1 ^ h2 ^ h3; // or use boost::hash_combine
|
||||
return h;
|
||||
}
|
||||
};
|
||||
} // std namespace
|
||||
|
|
@ -37,7 +37,7 @@ namespace SACN {
|
|||
Receiver::Receiver(UUID::uuid cid)
|
||||
: Appliance(cid)
|
||||
{
|
||||
fctn_ = "libESTA sACN Receiver";
|
||||
fctn_ = "OpenLCP sACN Receiver";
|
||||
|
||||
RlpRegisterVector(VECTOR_ROOT_E131_DATA, std::bind(&Receiver::dataReceiver,
|
||||
this, std::placeholders::_1));
|
||||
|
|
@ -189,7 +189,7 @@ void Receiver::extendedReceiver(std::shared_ptr<ACN::RLP::Pdu> root)
|
|||
*
|
||||
*/
|
||||
void Receiver::dataFrameHandler(std::shared_ptr<DATA::Pdu> frame) {
|
||||
auto source = std::shared_ptr<UniverseSource>(new UniverseSource(frame));
|
||||
auto source = std::shared_ptr<Provenance>(new Provenance(frame));
|
||||
|
||||
if (!universes_.count(source->universe()))
|
||||
return;
|
||||
|
|
|
|||
|
|
@ -23,11 +23,11 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "acn/appliance.h"
|
||||
#include "rlp/appliance.h"
|
||||
#include "data.h"
|
||||
#include "extended.h"
|
||||
#include "sacn.h"
|
||||
#include "universe.h"
|
||||
#include "mergeproxyuniverse.h"
|
||||
|
||||
#include <unordered_map>
|
||||
#include <vector>
|
||||
|
|
@ -35,7 +35,7 @@
|
|||
namespace SACN {
|
||||
|
||||
class Receiver
|
||||
: public virtual ACN::Appliance
|
||||
: public virtual ACN::RLP::Appliance
|
||||
{
|
||||
public:
|
||||
Receiver(UUID::uuid = UUID::uuid());
|
||||
|
|
|
|||
|
|
@ -32,7 +32,7 @@ namespace SACN {
|
|||
Source::Source(UUID::uuid cid)
|
||||
: Appliance(cid)
|
||||
{
|
||||
fctn_ = "libESTA sACN Source";
|
||||
fctn_ = "OpenLCP sACN Source";
|
||||
}
|
||||
|
||||
|
||||
|
|
@ -46,11 +46,11 @@ void Source::create(const uint16_t num)
|
|||
return;
|
||||
universes_.emplace(num, new Universe());
|
||||
|
||||
auto source = std::shared_ptr<UniverseSource>(new UniverseSource());
|
||||
auto source = std::shared_ptr<Provenance>(new Provenance());
|
||||
source->setCID(this->cid());
|
||||
source->setDescription(this->name());
|
||||
source->setUniverse(num);
|
||||
universes_[num]->setSource(source);
|
||||
universes_[num]->setProvenance(source);
|
||||
}
|
||||
|
||||
|
||||
|
|
|
|||
|
|
@ -23,7 +23,7 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "acn/appliance.h"
|
||||
#include "rlp/appliance.h"
|
||||
#include "sacn.h"
|
||||
#include "universe.h"
|
||||
|
||||
|
|
@ -33,7 +33,7 @@ namespace SACN {
|
|||
|
||||
|
||||
class Source
|
||||
: public virtual ACN::Appliance
|
||||
: public virtual ACN::RLP::Appliance
|
||||
{
|
||||
public:
|
||||
Source(UUID::uuid = UUID::uuid());
|
||||
|
|
|
|||
|
|
@ -22,80 +22,26 @@
|
|||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "acn/rlp.h"
|
||||
#include "universe.h"
|
||||
#include "config.h"
|
||||
|
||||
namespace SACN {
|
||||
|
||||
/**
|
||||
* @brief UniverseSource::UniverseSource
|
||||
*/
|
||||
UniverseSource::UniverseSource()
|
||||
: cid_(UUID::uuid())
|
||||
, description_(std::string())
|
||||
, universe_(0)
|
||||
, priority_(100)
|
||||
, sync_address_(0)
|
||||
, options_(0)
|
||||
{}
|
||||
|
||||
|
||||
/**
|
||||
* @brief UniverseSource::UniverseSource
|
||||
* @param pdu
|
||||
*
|
||||
* Construct a Universe Source from an sACN frame PDU
|
||||
*/
|
||||
UniverseSource::UniverseSource(std::shared_ptr<DATA::Pdu> pdu)
|
||||
{
|
||||
auto root_header = static_cast<ACN::RLP::rlp_header*>(pdu->parent()->header());
|
||||
auto frame_header = static_cast<DATA::data_header*>(pdu->header());
|
||||
|
||||
cid_ = root_header->cid;
|
||||
description_ = frame_header->source_name;
|
||||
universe_ = frame_header->universe;
|
||||
priority_ = frame_header->priority;
|
||||
sync_address_ = frame_header->sync_address;
|
||||
options_ = frame_header->options;
|
||||
};
|
||||
|
||||
|
||||
/**
|
||||
* @brief operator ==
|
||||
* @param a
|
||||
* @param b
|
||||
* @return
|
||||
*/
|
||||
bool operator== (const UniverseSource& a, const UniverseSource& b)
|
||||
{
|
||||
return (std::hash<UniverseSource>{}(a) == std::hash<UniverseSource>{}(b));
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Universe::Universe
|
||||
*/
|
||||
Universe::Universe()
|
||||
: DMX::Universe(E131_NETWORK_DATA_LOSS_TIMEOUT)
|
||||
, ACN::DMP::Device()
|
||||
{
|
||||
sync_data_.clear();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Universe::~Universe
|
||||
*/
|
||||
Universe::~Universe()
|
||||
{
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
Set universe data from a DMP PDU from a UniverseSource.
|
||||
*/
|
||||
void Universe::set(std::shared_ptr<ACN::DMP::Pdu> dmp,
|
||||
std::shared_ptr<UniverseSource> source)
|
||||
std::shared_ptr<Provenance> source)
|
||||
{
|
||||
/// 7.3 Address Type and Data Type
|
||||
/// Sources shall set the DMP Layer's Address Type and Data Type to 0xa1.
|
||||
|
|
@ -131,7 +77,7 @@ void Universe::set(std::shared_ptr<ACN::DMP::Pdu> dmp,
|
|||
if (range.count < 1 || range.count > 513)
|
||||
return;
|
||||
|
||||
setSource(source);
|
||||
setProvenance(source);
|
||||
|
||||
/// 7.7 Property Values (DMX512-A Data)
|
||||
/// The DMP Layer's Property values field is used to encode the
|
||||
|
|
@ -154,9 +100,9 @@ void Universe::set(std::shared_ptr<ACN::DMP::Pdu> dmp,
|
|||
* @brief Universe::setSource
|
||||
* @param source
|
||||
*/
|
||||
void Universe::setSource(std::shared_ptr<UniverseSource> source)
|
||||
void Universe::setProvenance(std::shared_ptr<Provenance> source)
|
||||
{
|
||||
source_ = source;
|
||||
provenance_ = source;
|
||||
}
|
||||
|
||||
|
||||
|
|
@ -190,232 +136,4 @@ void Universe::synchronize()
|
|||
sync_data_.clear();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::MergeProxyUniverse
|
||||
*/
|
||||
MergeProxyUniverse::MergeProxyUniverse()
|
||||
: SACN::Universe()
|
||||
{
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::~MergeProxyUniverse
|
||||
*/
|
||||
MergeProxyUniverse::~MergeProxyUniverse()
|
||||
{
|
||||
for (auto& [_, universe] : sources_)
|
||||
delete universe;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::sources
|
||||
* @return
|
||||
*/
|
||||
const std::vector<UniverseSource> MergeProxyUniverse::sources() const
|
||||
{
|
||||
std::vector<UniverseSource> keys;
|
||||
for (const auto& [key, _] : sources_)
|
||||
keys.push_back(key);
|
||||
return keys;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::sourceUniverse
|
||||
* @return
|
||||
*/
|
||||
Universe* MergeProxyUniverse::sourceUniverse(const UniverseSource &src)
|
||||
{
|
||||
if (!hasSourceUniverse(src))
|
||||
newSource_(src);
|
||||
return sources_.at(src);
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::hasSourceUniverse
|
||||
* @return
|
||||
*/
|
||||
bool MergeProxyUniverse::hasSourceUniverse(const UniverseSource& src) const
|
||||
{
|
||||
if (sources_.count(src))
|
||||
return true;
|
||||
return false;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::hassources
|
||||
* @return
|
||||
*/
|
||||
bool MergeProxyUniverse::hasSources() const
|
||||
{
|
||||
if (sources_.size())
|
||||
return true;
|
||||
return false;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::deleteSourceUniverse
|
||||
* @return
|
||||
*/
|
||||
void MergeProxyUniverse::deleteSourceUniverse(const UniverseSource& src)
|
||||
{
|
||||
if (sources_.count(src))
|
||||
{
|
||||
delete sources_.at(src);
|
||||
sources_.erase(src);
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::addSourceUniverse
|
||||
*/
|
||||
void MergeProxyUniverse::addSourceUniverse(Universe* universe)
|
||||
{
|
||||
sources_.at(*universe->source()) = universe;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::dataChangedNotifier
|
||||
* @param universe
|
||||
*/
|
||||
void MergeProxyUniverse::dataChangedNotifier(DMX::Universe* dmx)
|
||||
{
|
||||
auto sacn = static_cast<SACN::Universe*>(dmx);
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return;
|
||||
if (sacn->source() == universe->source())
|
||||
for (const auto &cb : callbacks_)
|
||||
cb(this);
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::isSyncronized
|
||||
* @return
|
||||
*/
|
||||
bool MergeProxyUniverse::isSyncronized() const
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return false;
|
||||
return universe->isSyncronized();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::source
|
||||
* @return
|
||||
*/
|
||||
std::shared_ptr<UniverseSource> MergeProxyUniverse::source() const
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return nullptr;
|
||||
return universe->source();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::set
|
||||
* @param pdu
|
||||
* @param source
|
||||
*/
|
||||
void MergeProxyUniverse::set(std::shared_ptr<ACN::DMP::Pdu> pdu,
|
||||
std::shared_ptr<UniverseSource> src)
|
||||
{
|
||||
if (!sources_.count(*src))
|
||||
newSource_(*src);
|
||||
|
||||
sources_.at(*src)->set(pdu, src);
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::synchronize
|
||||
*/
|
||||
void MergeProxyUniverse::synchronize()
|
||||
{
|
||||
for ( auto& [_, uni] : sources_)
|
||||
uni->synchronize();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::data
|
||||
* @return
|
||||
*/
|
||||
const DMX::DimmerData * MergeProxyUniverse::data() const
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return nullptr;
|
||||
return universe->data();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::slot
|
||||
* @param s
|
||||
* @return
|
||||
*/
|
||||
uint8_t MergeProxyUniverse::slot(const uint16_t s)
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return 0;
|
||||
return universe->slot(s);
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::rxRate
|
||||
* @return
|
||||
*/
|
||||
double MergeProxyUniverse::rxRate()
|
||||
{
|
||||
auto universe = dominant_();
|
||||
if (!universe)
|
||||
return 0.0;
|
||||
return universe->rxRate();
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::dominant_
|
||||
* @return
|
||||
*/
|
||||
Universe* MergeProxyUniverse::dominant_() const
|
||||
{
|
||||
Universe* ret = nullptr;
|
||||
for (auto& [_, uni] : sources_)
|
||||
{
|
||||
if (uni->rxRate() < (DMX::E111_DATA_LOSS_TIMEOUT / 1000.0))
|
||||
continue; // stale universes cannot be dominant
|
||||
if (!ret || uni->source()->priority() > ret->source()->priority())
|
||||
ret = uni;
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief MergeProxyUniverse::newSource_
|
||||
* @param src
|
||||
*/
|
||||
void MergeProxyUniverse::newSource_(const UniverseSource &src)
|
||||
{
|
||||
sources_.emplace(src, new Universe());
|
||||
sources_.at(src)->onData(std::bind(&SACN::MergeProxyUniverse::dataChangedNotifier,
|
||||
this, std::placeholders::_1));
|
||||
}
|
||||
|
||||
}; // SACN
|
||||
}; // namespace SACN
|
||||
|
|
|
|||
132
sacn/universe.h
132
sacn/universe.h
|
|
@ -23,148 +23,38 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "acn/dmp.h"
|
||||
#include "data.h"
|
||||
#include "dmp/dmp.h"
|
||||
#include "dmp/device.h"
|
||||
#include "dmx/universe.h"
|
||||
#include "sacn.h"
|
||||
#include "uuid/uuid.h"
|
||||
#include "provenance.h"
|
||||
|
||||
#include <cstdint>
|
||||
#include <memory>
|
||||
#include <unordered_map>
|
||||
#include <string>
|
||||
|
||||
namespace SACN {
|
||||
/**
|
||||
* @brief The UniverseSource class
|
||||
*/
|
||||
class UniverseSource
|
||||
{
|
||||
public:
|
||||
UniverseSource();
|
||||
UniverseSource(std::shared_ptr<DATA::Pdu>);
|
||||
|
||||
const UUID::uuid CID() const {return cid_;};
|
||||
const std::string description() const {return description_;}
|
||||
uint16_t universe() const {return universe_;}
|
||||
uint8_t priority() const {return priority_;}
|
||||
uint16_t syncAddress() const {return sync_address_;}
|
||||
bool isTerminated() const {return options_
|
||||
& DATA::STREAM_TERMINATED;}
|
||||
bool isPreview() const {return options_
|
||||
& DATA::PREVIEW_DATA;}
|
||||
bool isForced() const {return options_
|
||||
& DATA::FORCE_SYNCHRONIZATION;}
|
||||
|
||||
friend bool operator== (const UniverseSource& a, const UniverseSource& b);
|
||||
|
||||
void setCID(UUID::uuid cid) { cid_ = cid; }
|
||||
void setDescription(std::string desc) { description_ = desc; }
|
||||
void setOptions(uint8_t o) { options_ = o; }
|
||||
void setUniverse(uint16_t n) { if (n >= 1 && n <= 63999) universe_ = n; }
|
||||
void setSyncAddress(uint16_t a) { if (a >= 1 && a <= 63999) sync_address_ = a; }
|
||||
void setPriority(uint8_t p) { if (p <= 200) priority_ = p; }
|
||||
|
||||
private:
|
||||
UUID::uuid cid_;
|
||||
std::string description_;
|
||||
uint16_t universe_;
|
||||
uint8_t priority_;
|
||||
uint16_t sync_address_;
|
||||
uint8_t options_;
|
||||
};
|
||||
} // SACN namespace
|
||||
|
||||
|
||||
namespace std
|
||||
{
|
||||
template<>
|
||||
/**
|
||||
* @brief The hash struct specilizaton for SACN::UniverseSource
|
||||
*/
|
||||
struct hash<SACN::UniverseSource>
|
||||
{
|
||||
/**
|
||||
* @brief operator ()
|
||||
* @param src
|
||||
* @return
|
||||
*/
|
||||
size_t operator()(SACN::UniverseSource const& src) const noexcept
|
||||
{
|
||||
size_t h1 = hash<string>{}(src.description());
|
||||
size_t h2 = hash<UUID::uuid>{}(src.CID());
|
||||
size_t h3 = hash<int>{}(src.priority());
|
||||
size_t h = h1 ^ h2 ^ h3; // or use boost::hash_combine
|
||||
return h;
|
||||
}
|
||||
};
|
||||
} // std namespace
|
||||
#include <vector>
|
||||
|
||||
namespace SACN {
|
||||
/**
|
||||
* @brief The Universe class
|
||||
*/
|
||||
class Universe
|
||||
: public DMX::Universe
|
||||
: public DMX::Universe
|
||||
, public ACN::DMP::Device
|
||||
{
|
||||
public:
|
||||
Universe();
|
||||
~Universe();
|
||||
|
||||
virtual bool isSyncronized() const { return (sync_data_.size() > 0); };
|
||||
virtual std::shared_ptr<UniverseSource> source() const { return source_; }
|
||||
virtual std::shared_ptr<Provenance> source() const { return provenance_; }
|
||||
virtual uint8_t slot (const uint16_t) override;
|
||||
|
||||
virtual void set(std::shared_ptr<ACN::DMP::Pdu>, std::shared_ptr<UniverseSource>);
|
||||
virtual void setSource(std::shared_ptr<UniverseSource>);
|
||||
virtual void set(std::shared_ptr<ACN::DMP::Pdu>, std::shared_ptr<Provenance>);
|
||||
virtual void setProvenance(std::shared_ptr<Provenance>);
|
||||
|
||||
virtual void synchronize();
|
||||
|
||||
private:
|
||||
std::shared_ptr<UniverseSource> source_;
|
||||
std::shared_ptr<Provenance> provenance_;
|
||||
std::vector<uint8_t> sync_data_;
|
||||
};
|
||||
|
||||
|
||||
/**
|
||||
* @brief The MergeProxyUniverse class
|
||||
* 6.2.3.1 Multiple Sources at Highest Priority
|
||||
* It is possible for there to be multiple sources, all transmitting data
|
||||
* at the highest currently active priority for a given universe. When this
|
||||
* occurs, receivers must handle these sources in some way.
|
||||
*/
|
||||
class MergeProxyUniverse
|
||||
: public SACN::Universe
|
||||
{
|
||||
public:
|
||||
MergeProxyUniverse();
|
||||
~MergeProxyUniverse();
|
||||
|
||||
// Source universes:
|
||||
const std::vector<UniverseSource> sources() const;
|
||||
Universe* sourceUniverse(const UniverseSource&);
|
||||
bool hasSourceUniverse(const UniverseSource&) const;
|
||||
bool hasSources() const;
|
||||
void deleteSourceUniverse(const UniverseSource&);
|
||||
void addSourceUniverse(Universe *);
|
||||
void dataChangedNotifier(DMX::Universe* universe);
|
||||
|
||||
// SACN::Universe overrides:
|
||||
bool isSyncronized() const override;
|
||||
std::shared_ptr<UniverseSource> source() const override;
|
||||
void set(std::shared_ptr<ACN::DMP::Pdu>, std::shared_ptr<UniverseSource>) override;
|
||||
void setSource(std::shared_ptr<UniverseSource>) override {};
|
||||
void synchronize() override;
|
||||
|
||||
// DMX::Universe Overrides:
|
||||
const DMX::DimmerData *data() const override;
|
||||
uint8_t slot(const uint16_t) override;
|
||||
double rxRate() override;
|
||||
|
||||
private:
|
||||
std::unordered_map<UniverseSource, SACN::Universe*> sources_;
|
||||
|
||||
Universe* dominant_() const;
|
||||
void newSource_(const UniverseSource&);
|
||||
};
|
||||
|
||||
} // SACN namespace
|
||||
|
|
|
|||
|
|
@ -0,0 +1,18 @@
|
|||
target_sources(${PROJECT_NAME}
|
||||
PUBLIC
|
||||
sdt/leader.h
|
||||
sdt/member.h
|
||||
PRIVATE
|
||||
sdt/channel.cpp
|
||||
sdt/channel.h
|
||||
sdt/leader.cpp
|
||||
sdt/member.cpp
|
||||
sdt/identity.cpp
|
||||
sdt/identity.h
|
||||
sdt/sdt.cpp
|
||||
sdt/sdt.h
|
||||
sdt/session.cpp
|
||||
sdt/session.h
|
||||
sdt/udp.cpp
|
||||
sdt/udp.h
|
||||
)
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
sdt-channel.cpp
|
||||
sdt/channel.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -22,10 +22,9 @@
|
|||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "sdt-channel.h"
|
||||
#include "channel.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace SDT {
|
||||
namespace ACN::SDT {
|
||||
|
||||
/**
|
||||
* @brief Channel::Channel
|
||||
|
|
@ -45,5 +44,4 @@ Channel::~Channel() {
|
|||
// TODO: close the channel.
|
||||
}
|
||||
|
||||
} // namespace SDT
|
||||
} // namespace ACN
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
sdt-channel.h
|
||||
sdt/channel.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -23,12 +23,11 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "component.h"
|
||||
#include "acn/component.h"
|
||||
|
||||
#include <memory>
|
||||
|
||||
namespace ACN {
|
||||
namespace SDT {
|
||||
namespace ACN::SDT {
|
||||
|
||||
/**
|
||||
* @brief 3.3 Sequenced Channels
|
||||
|
|
@ -56,5 +55,4 @@ private:
|
|||
Direction direction_ = internal;
|
||||
};
|
||||
|
||||
} // namespace SDT
|
||||
} // namespace ACN
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
/*
|
||||
sdt/member.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "identity.h"
|
||||
|
||||
namespace ACN::SDT {
|
||||
|
||||
Identity::Identity()
|
||||
{
|
||||
|
||||
}
|
||||
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -0,0 +1,34 @@
|
|||
/*
|
||||
sdt/identity.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
namespace ACN::SDT {
|
||||
|
||||
class Identity
|
||||
{
|
||||
public:
|
||||
Identity();
|
||||
};
|
||||
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -0,0 +1,67 @@
|
|||
/*
|
||||
sdt/leader.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "leader.h"
|
||||
|
||||
namespace ACN::SDT {
|
||||
|
||||
/**
|
||||
* @brief Leader::Leader
|
||||
* @param cid
|
||||
*/
|
||||
Leader::Leader(UUID::uuid cid)
|
||||
: ACN::RLP::Appliance(cid)
|
||||
{
|
||||
fctn_ = "OpenLCP SDT Leader";
|
||||
|
||||
/**
|
||||
* 1.3.1. Recursive use of PDU Format in Other Protocols
|
||||
* ... within ACN as currently specified, there is just one higher layer
|
||||
* protocol defined which interfaces directly to the root layer:
|
||||
* Session Data Transport
|
||||
*/
|
||||
RlpRegisterVector(SDT::SDT_PROTOCOL_ID, std::bind(&Leader::SdtReceiver,
|
||||
this, std::placeholders::_1));
|
||||
}
|
||||
|
||||
|
||||
/**
|
||||
* @brief Leader::SdtReceiver
|
||||
* @param rlp
|
||||
*/
|
||||
void Leader::SdtReceiver(std::shared_ptr<RLP::Pdu> root)
|
||||
{
|
||||
root->createDataBlock<SDT::Pdu>();
|
||||
auto block = static_cast<PDU::Block<SDT::Pdu>*>(root->data());
|
||||
|
||||
for(auto const &sdt : *block->pdu) {
|
||||
switch(sdt->vector()) {
|
||||
/// TODO: handle SDT
|
||||
default:
|
||||
break;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -0,0 +1,54 @@
|
|||
/*
|
||||
sdt/leader.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#include "session.h"
|
||||
#include "rlp/appliance.h"
|
||||
|
||||
#include <vector>
|
||||
#include <memory>
|
||||
|
||||
namespace ACN::SDT {
|
||||
|
||||
class Leader
|
||||
: public ACN::RLP::Appliance
|
||||
{
|
||||
public:
|
||||
Leader(UUID::uuid = UUID::uuid());
|
||||
|
||||
// RLP->SDT frames
|
||||
virtual void SdtReceiver(std::shared_ptr<RLP::Pdu>);
|
||||
// SDT 4.4 SDT Base Layer Messages
|
||||
// Join, Get Sessions, and Sessions are ad-hoc messages, that is, they are
|
||||
// not sent within channels. These messages identify their intended recipient
|
||||
// by CID.
|
||||
virtual void SdtJoinSession() {};
|
||||
virtual void SdtGetSessions() {};
|
||||
virtual void SdtSessions() {};
|
||||
|
||||
private:
|
||||
std::vector<std::shared_ptr<Session>> sdt_sessions_;
|
||||
};
|
||||
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -0,0 +1,39 @@
|
|||
/*
|
||||
sdt/member.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "member.h"
|
||||
|
||||
namespace ACN::SDT {
|
||||
|
||||
/**
|
||||
* @brief Member::Member
|
||||
* @param cid
|
||||
*/
|
||||
Member::Member(UUID::uuid cid)
|
||||
: ACN::RLP::Appliance(cid)
|
||||
{
|
||||
fctn_ = "OpenLCP SDT Member";
|
||||
}
|
||||
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -0,0 +1,37 @@
|
|||
/*
|
||||
sdt/member.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
copies of the Software, and to permit persons to whom the Software is
|
||||
furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all
|
||||
copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
|
||||
SOFTWARE.
|
||||
*/
|
||||
#pragma once
|
||||
|
||||
#include "rlp/appliance.h"
|
||||
|
||||
namespace ACN::SDT {
|
||||
|
||||
class Member
|
||||
: public ACN::RLP::Appliance
|
||||
{
|
||||
public:
|
||||
Member(UUID::uuid = UUID::uuid());
|
||||
};
|
||||
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -24,8 +24,7 @@
|
|||
|
||||
#include "sdt.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace SDT {
|
||||
namespace ACN::SDT {
|
||||
|
||||
namespace CLIENT {
|
||||
|
||||
|
|
@ -521,6 +520,4 @@ void disconnecting_data::oStream(PDU::Stream stream) const
|
|||
*stream << reason;
|
||||
}
|
||||
|
||||
|
||||
} // namespace SDT
|
||||
} // namespace ACN
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -23,16 +23,12 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "component.h"
|
||||
#include "pdu.h"
|
||||
#include "sdt-udp.h" // EPI 18
|
||||
|
||||
#include <vector>
|
||||
#include "acn/pdu.h"
|
||||
#include "udp.h" // EPI 18
|
||||
|
||||
// ANSI E1.17- 2015, Architecture for Control Networks–
|
||||
// Session Data Transport Protocol
|
||||
namespace ACN {
|
||||
namespace SDT {
|
||||
namespace ACN::SDT {
|
||||
|
||||
/**
|
||||
* @brief 7.1 Protocol Code
|
||||
|
|
@ -371,5 +367,4 @@ struct disconnecting_data
|
|||
void oStream(PDU::Stream) const override;
|
||||
};
|
||||
|
||||
} // SDT
|
||||
} // ACN
|
||||
} // ACN::SDT
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
sdt-session.cpp
|
||||
sdt/session.cpp
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -22,10 +22,9 @@
|
|||
SOFTWARE.
|
||||
*/
|
||||
|
||||
#include "sdt-session.h"
|
||||
#include "session.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace SDT {
|
||||
namespace ACN::SDT {
|
||||
|
||||
/**
|
||||
* @brief SessionId::operator == sessionID comparitor
|
||||
|
|
@ -67,5 +66,4 @@ SessionId Session::id() {
|
|||
return ret;
|
||||
}
|
||||
|
||||
} // namespace SDT
|
||||
} // namespace ACN
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
sdt-session.h
|
||||
sdt/session.h
|
||||
|
||||
Copyright (c) 2021 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -23,12 +23,12 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "channel.h"
|
||||
#include "sdt.h"
|
||||
#include "sdt-channel.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace SDT {
|
||||
#include <memory>
|
||||
#include <unordered_map>
|
||||
|
||||
namespace ACN::SDT {
|
||||
|
||||
/**
|
||||
* @brief 3.1 Session Identity
|
||||
|
|
@ -84,5 +84,4 @@ private:
|
|||
};
|
||||
|
||||
|
||||
} // namespace SDT
|
||||
} // namespace ACN
|
||||
} // namespace ACN::SDT
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
sdt-udp.cpp
|
||||
sdt/udp.cpp
|
||||
|
||||
Copyright (c) 2020 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -23,12 +23,9 @@
|
|||
*/
|
||||
|
||||
#include "sdt.h"
|
||||
#include "sdt-udp.h"
|
||||
|
||||
namespace ACN {
|
||||
namespace SDT {
|
||||
namespace UDP {
|
||||
#include "udp.h"
|
||||
|
||||
namespace ACN::SDT::UDP {
|
||||
|
||||
/**
|
||||
* @brief ipAddress::streamSize
|
||||
|
|
@ -99,6 +96,4 @@ void ipAddress::oStream(PDU::Stream stream) const
|
|||
}
|
||||
}
|
||||
|
||||
}; // UDP
|
||||
}; // SDT
|
||||
}; // ACN
|
||||
}; // ACN::SDT::UDP
|
||||
|
|
@ -1,5 +1,5 @@
|
|||
/*
|
||||
sdt-udp.h
|
||||
sdt/udp.h
|
||||
|
||||
Copyright (c) 2020 Kevin Matz (kevin.matz@gmail.com)
|
||||
|
||||
|
|
@ -23,13 +23,11 @@
|
|||
*/
|
||||
#pragma once
|
||||
|
||||
#include "acn/pdu.h"
|
||||
#include <cstdint>
|
||||
#include "pdu.h"
|
||||
|
||||
// ACN EPI 18 - Operation of SDT on UDP Networks
|
||||
namespace ACN {
|
||||
namespace SDT {
|
||||
namespace UDP {
|
||||
namespace ACN::SDT::UDP {
|
||||
|
||||
// Table 3. SDT symbolic parameters
|
||||
static const float MAK_TIMEOUT_FACTOR = 0.1;
|
||||
|
|
@ -64,6 +62,4 @@ struct ipAddress
|
|||
void oStream(PDU::Stream) const override;
|
||||
};
|
||||
|
||||
} // UDP
|
||||
} // SDT
|
||||
} // ACN
|
||||
} // ACN::SDT::UDP
|
||||
Some files were not shown because too many files have changed in this diff Show More
Loading…
Reference in New Issue